Sistema de Posicionamento Interno Preciso para Drones Autônomos
Explicamos como projetar e construir drones autônomos para ambientes internos e quais sistemas de posicionamento interno usar para rastrear drones em ambientes internos quando eles não são autônomos.
Embora nosso foco seja em drones para ambientes internos e navegação autônoma de drones em ambientes internos, o sistema de posicionamento para drones funciona perfeitamente bem em ambientes externos.
Para drones baseados em Pixhawk/ArduPilot/PX4, utilize o seguinte link.


Para drones DJI em ambientes internos, há uma página dedicada: Como voar com um drone DJI de forma autônoma em ambientes internos?
Leia aqui para saber como escolher entre DJI e Pixhawk.
Outras fontes de ajuda da Marvelmind relacionadas a drones
- Sucesso de cliente: Voo autônomo de drone em ambiente interno baseado em PixHawk + ArduPilot
- Alimentando beacons com fonte de alimentação externa
- Sistema de posicionamento interno para competição de drones
- Quantos beacons estacionários precisamos para cobrir nosso espaço de escritório para um drone de patrulha autônomo em ambiente interno?
- Usando IA para drones
- Rastreamento de DJI em ambiente interno: edição de dois cômodos
- Rastreamento XYZ preciso para enxames de drones e shows de drones em ambientes internos
- Plataforma de pouso autônomo para drones
- Degradação de precisão em sistema de posicionamento interno preciso e como evitá-la
- Ajuda: PixHawk + PX4 + Beacons Pareados para Localização + Direção em vez de magnetômetros
- Ajuda: Voando drones autônomos para inspeção em um armazém
- Rastreamento de micro-drone em ambiente interno a longa distância
- Rastreamento de micro-drone com o Player em Tempo Real ativado
- Rastreamento de micro-drone com o Player em Tempo Real desativado
- Rastreamento interno preciso (±2 cm) em XYZ sem GPS/GLONASS
- Rastreamento preciso (±2 cm) de drone em ambiente externo sem GPS/GLONASS – voo horizontal em dois escalões
- Voo totalmente autônomo em ambiente interno
- Ajuda: posicionando beacon móvel no helicóptero
- Ajuda: Coordenadas Z para helicópteros – explicação detalhada
- Helicóptero rastreado em ambiente externo com precisão de alguns centímetros
RTLS interno recomendado para drones - dicas rápidas
Se você é novo no sistema Marvelmind Indoor “GPS” e não tem certeza do que escolher, adquira o Starter Set Super-MP, onde MP significa multipropósito, e essa será sua escolha mais segura.
Para mais detalhes, consulte as opções recomendadas abaixo.
No geral, a melhor e mais segura escolha quando você não tem certeza do que escolher ou quais experimentos exatos realizará, mas deseja simultaneamente ter a maior flexibilidade e desempenho.
É a melhor escolha quando você precisa se conectar ao PixHawk, pois dois pinos para a conexão ao PixHawk estão prontamente disponíveis no Super-Beacon. Veja mais.
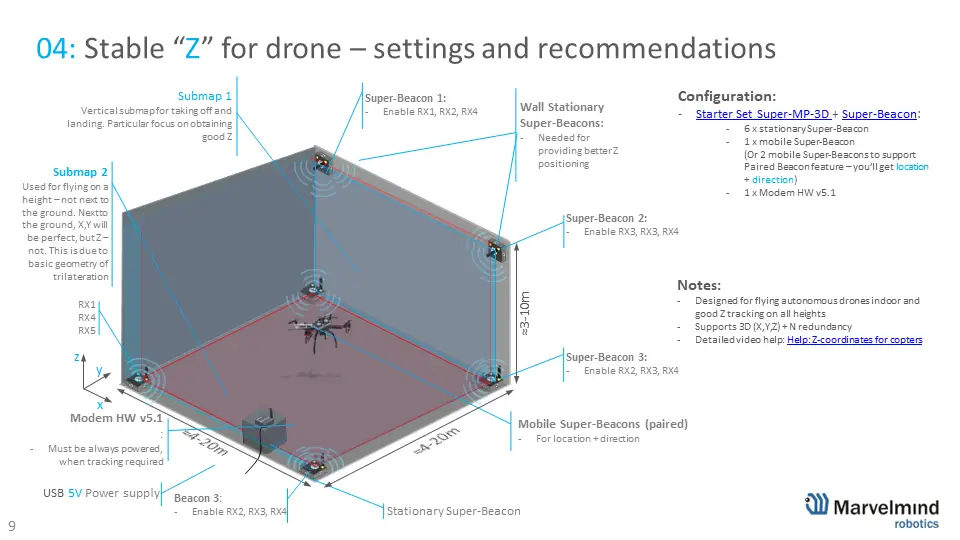
Configuração:
– https://marvelmind.com/product/starter-set-super-mp-3d/
– https://marvelmind.com/product/super-beacon/ – um beacon móvel adicional para a configuração de Beacons Pareados, para ter tanto localização quanto direção. Veja mais sobre a demonstração de Beacons Pareados
O conjunto foi projetado para micro-drones (<100g) porque o beacon móvel Mini-TX é minúsculo e leve. O Mini-TX pode cobrir até 15-20m de alcance até os beacons estacionários, suficiente para a maioria dos casos reais. O conjunto também pode ser usado para drones maiores, mas o alcance de ultrassom do Mini-TX é menor do que o dos Super-Beacons. Portanto, se o peso não for um fator crítico, a melhor escolha é usar Super-Beacons como beacons móveis. Somente quando o peso é realmente a única preocupação, o Mini-TX é imbatível.
O Mini-TX é excelente para rastreamento. A nova versão Mini-TX-2 também é ideal para conexão ao PixHawk, pois possui um conector especial de 6 pinos com dois pinos dedicados à conectividade com o PixHawk (TX + GND) – similar aos do Super-Beacon. Observe que versões mais antigas do Mini-TX – entregues em 2022 e anteriores – não possuíam o conector de 6 pinos na parte inferior.
Configuração:
– https://marvelmind.com/product/starter-set-nia-03-smalldrone
Uma versão avançada da opção “Starter Set Super-MP-3D + Super-Beacon – Localização+Direção no drone”.
O Precise-Z, que fisicamente consiste em 2 beacons estacionários adicionais, oferece a possibilidade de ter coordenadas Z precisas em todas as faixas de Z.
Veja mais:
– Manual de Posicionamento – slide do Precise-Z
– Explicação em vídeo sobre Z e posicionamento de beacons
Configuração:
– https://marvelmind.com/product/starter-set-super-mp-3d/
– https://marvelmind.com/product/super-beacon/ – um beacon móvel adicional para a configuração de Beacons Pareados, para ter tanto localização quanto direção. Veja mais sobre a demonstração de Beacons Pareados
– https://marvelmind.com/product/super-beacon/ – beacons estacionários adicionais para o recurso Precise-Z

Usando o Marvelmind Indoor "GPS" para drones e quadricópteros
O sistema de posicionamento interno Marvelmind ou Marvelmind Indoor “GPS” é amplamente utilizado para drones ou quadricópteros de diversas maneiras:
- Guiando drones autônomos em ambientes internos e externos. Drones externos – guiando para “a última milha”, que pode ser de centenas de metros, se necessário, mas a distância máxima do beacon móvel no drone até três ou mais beacons estacionários que servem ao beacon móvel não deve ultrapassar
- Rastreamento de drones em ambientes internos
- Pouso automático de drones em ambientes internos e externos ou assistência ao pouso de drones
- Inspeção de armazéns utilizando drones autônomos em ambientes internos
- Shows de drones


O sistema de posicionamento interno para um pequeno drone não é significativamente diferente de outros sistemas de posicionamento interno, como os usados para drones maiores ou outros sistemas de posicionamento interno 3D (XYZ).
A única peculiaridade é o peso do beacon móvel (tag) instalado no drone. Isso é resolvido usando uma versão simplificada do Mini-TX, que envolve a remoção da carcaça, a remoção da bateria ou sua substituição por uma bateria muito leve.
Além disso, drones menores são frequentemente básicos – eles não possuem computador de bordo ou piloto automático, por exemplo, como Pixhawk e modelos similares. Toda a inteligência vem da estação em solo. No entanto, há exceções.

{kind=link}
Enxames de drones e shows de drones podem incluir dezenas ou até centenas de drones. Quando voam em ambientes externos, o RTK GPS tem um desempenho muito bom. Mas o RTK GPS não funciona em ambientes internos.
IA deve ser usado se o enxame de drones em ambiente interno consistir em dezenas de drones. No entanto, em IA, o beacon móvel escuta o ultrassom; portanto, soluções especiais devem ser usadas para combater o ruído das hélices e garantir o funcionamento adequado do sistema. Saiba mais sobre a solução.
Recebemos semanalmente solicitações de drones autônomos ou sistemas de posicionamento interno para drones autônomos em ambientes internos, principalmente para inspeção de armazéns, varredura automatizada de códigos de barras ou leitura de RFID.
Indubitavelmente, há uma necessidade sólida para essa tarefa e um forte interesse em realizá-la usando drones.
Construir tal sistema para aplicações do mundo real é uma tarefa complexa, mas viável. Vamos discutir os detalhes da implementação.

A fragilidade da solução é a preocupação prática mais significativa. No entanto, existem soluções e até alternativas robustas.
Marvelmind Indoor "GPS" suporta PixHawk com ArduPilot e PX4
Marvelmind Indoor “GPS” suporta tanto PixHawk com ArduPilot quanto PX4:
- Marvelmind e ArduPilot – link para ArduPilot.org
- Manual de Integração Marvelmind e PX4 – orientação passo a passo com configurações e capturas de tela para Mission Planner, PixHawk e conectividade de hardware
- Manual de Integração PixHawk e Marvelmind – um guia passo a passo para integração de PixHawk, ArduPilot e Marvelmind para drones
Marvelmind e PixHawk
Usar uma combinação do Marvelmind Indoor “GPS” e PixHawk é a maneira mais fácil e rápida de voar de forma autônoma em ambientes internos.

Construa corretamente o sistema de posicionamento interno para quadricópteros
Existem alguns aspectos simples que devem ser levados em conta para voar com sucesso em ambientes internos:
- Manual de configurações para helicóptero autônomo – recomendações básicas e práticas para a configuração do sistema Indoor “GPS” para uso com helicópteros/drones autônomos em ambientes internos e externos
- Manual de Posicionamento – conselhos práticos e exemplos de como montar o sistema Marvelmind Indoor “GPS” para obter o melhor desempenho em diferentes aplicações e configurações
- Ajuda: Coordenadas Z para helicópteros – Explicação detalhada – vídeo no YouTube explicando como posicionar corretamente os beacons estacionários para obter boa precisão em Z. Se você não puder usar o conselho porque seu ambiente não permite usar a configuração Precise Z com 4+2 beacons estacionários. Lembre-se de que essa configuração é recomendada apenas para usuários avançados e somente quando uma configuração muito mais básica, robusta e ainda mais precisa com quatro beacons estacionários acima da área de voo não puder ser usada ou for impraticável
Consulte a página de Produtos para ver as diversas opções de starter sets.
Lembre-se de que apenas três beacons estacionários teriam pouca resiliência contra obstruções para rastreamento 3D (XYZ). Qualquer oclusão de qualquer beacon estacionário – uma situação de linha de visão/audição comprometida – resultará em ausência de rastreamento ou rastreamento incorreto – como no GPS: “sem visibilidade de satélite = sem coordenadas GPS = sem rastreamento”.
Portanto, recomendamos pelo menos redundância N+1 para beacons estacionários. E é por isso que nossos starter sets para 3D consistem em 4 beacons estacionários.
Ainda melhor é ter redundância 2N com submapas 3D totalmente sobrepostos. Isso seria 3+3 ou 4+4 beacons estacionários. O sistema escolheria automaticamente o melhor submapa para rastreamento. Esse tipo de sistema é muito resiliente e, com o posicionamento adequado dos beacons, você pode voar mesmo em salas complexas com colunas, por exemplo, sem problemas de rastreamento.
A chave para um excelente rastreamento é garantir cobertura adequada em qualquer ponto de voo. Isso significa que os beacons móveis no drone devem ter três ou mais beacons estacionários pertencentes ao mesmo submapa, com uma linha de visão/audição clara e direta dentro de 30m.
O posicionamento adequado geralmente é fundamental e vital para drones, pois eles exigem capacidades 3D; os drones são rápidos e os erros podem ser especialmente custosos. No que prestar atenção?
- O requisito mais crítico para um bom rastreamento ou voo autônomo é garantir uma linha de visão/audição clara dos beacons móveis no drone para 3 ou mais beacons estacionários
- Não confie em magnetômetros em ambientes internos. Use a configuração de Beacons Pareados para Localização+Direção
- Posicione os beacons estacionários de forma que os ângulos do beacon móvel para os beacons estacionários sejam de 30 graus ou mais. Veja uma explicação mais detalhada no vídeo
- Use as configurações Precise-Z quando não for possível obter ângulos adequados para os beacons estacionários de outras formas
Rastrear um drone em ambiente interno em um grande espaço aberto é muito fácil. Com um Starter Set Super-MP ou Starter Set NIA-SmallDrone, o sistema de rastreamento 3D preciso pode ser configurado em 10 a 15 minutos, incluindo desempacotamento e atualizações de software, em um conjunto que acabou de ser recebido. Se você tiver concluído todas as atualizações iniciais de software antes da configuração, o sistema poderá ser implantado em menos de um minuto.
O voo autônomo é uma tarefa significativamente mais complexa, pois você precisa rastrear um drone com precisão e integrar seu piloto automático com o drone/chassi, que normalmente é composto de diferentes partes (chassi, motores, controladores de motores, telemetria, controle remoto). E, além disso, o piloto automático deve ser integrado ao sistema de posicionamento interno conforme descrito acima.
Se o voo autônomo por um único drone é uma tarefa desafiadora, então o voo autônomo por um enxame de drones é o ápice dessa pirâmide de complexidade. É ainda mais desafiador, mas ainda viável se você o fizer passo a passo.
Antes de nos aprofundarmos nos enxames de drones em ambientes internos, vamos responder à pergunta básica: “Como aqueles milhares de drones voam no céu?” – bem, é simples – eles usam o sistema de posicionamento RTK GPS. No entanto, lembre-se de que o RTK GPS depende do GPS. Se não houver GPS, também não haverá RTK GPS. Portanto, assim que nos movemos para ambientes internos ou outras áreas de negação de GNSS, esqueça o GPS (GLONASS, Beidou, Galileo, etc.)
Drones pequenos são pequenos demais. Drones grandes são grandes demais
Ter um enxame massivo de pequenos drones e realizar um belo show seria ótimo. No entanto:
- Tamanho da bateria vs. duração do show vs. tamanho do drone
- O piloto automático e o sistema de posicionamento interno têm massa não nula. Há uma limitação mínima no tamanho dos drones
- Os drones precisam de direção. A direção é melhor obtida com dois ou mais pontos de localização nos drones. Quanto mais distantes estiverem, melhor será a precisão angular
Se os drones forem grandes demais:
- É difícil mantê-los separados. Você precisa de uma distância de segurança maior entre eles e, consequentemente, de um espaço maior para o show
- Drones maiores são mais pesados, mais barulhentos e mais perigosos. O ruído e as redes de proteção podem arruinar toda a ideia do show
Mantenha os drones acreditando que estão sozinhos
Em muitos casos, é possível configurar o voo autônomo de múltiplos drones de forma que eles nem saibam que há outros drones ao redor. Eles acreditam ser tão únicos e tão excepcionais. É do seu interesse mantê-los nessa crença ingênua, pois é a maneira mais simples de criar enxames de drones.
Exemplos de configurações de sistema de posicionamento interno para shows de drones baseados no Marvelmind Indoor "GPS"
Usando uma combinação de soluções, é possível voar um enxame de drones usando IA: Sistema de posicionamento interno para shows e enxames de drones.
Essa solução complexa pode não ser adequada se você é novo em nosso sistema ou em drones em geral. Mas oferece o melhor desempenho para shows de drones em ambientes internos, pois permite voar com múltiplos drones autônomos sem redução na taxa de atualização de localização e oferecendo a maior precisão de posicionamento de ±2cm.
Configuração:
- IA
- 4 x https://marvelmind.com/product/super-beacon/ – beacons estacionários posicionados ao redor e acima da área de voo
- 1 x Modem v5.1
- 10 x Mini-RX + Microfone – um beacon móvel híbrido para cada drone
Conforme discutido acima, a primeira decisão a tomar é se você precisa de direcionamento baseado nos Beacons Pareados. Se precisar, serão necessários dois beacons móveis por drone. Se não precisar, apenas um beacon móvel por drone.
É possível voar com um único beacon móvel, mas o SW no piloto automático deve ser mais complexo — não funciona imediatamente, pois deve fornecer a direção e a correção do desvio do giroscópio do drone durante o voo. É complexo. Viável. Mas complexo. E sempre que possível, recomendamos a configuração de Beacons Pareados como uma solução simples para direcionamento interno, mesmo em estático.
No entanto, conforme discutido acima, para enxames de drones ou shows de drones internos, essa pode não ser a melhor opção. Portanto, assumiremos uma opção mais complexa e frágil baseada em um único beacon móvel como variante principal do drone.
Configuração:
- MF NIA – MF NIA é fortemente recomendado para enxames de drones, pois NIA seria muito lento e os drones podem ser muito ruidosos para IA
- 4 x https://marvelmind.com/product/super-beacon/ – beacons estacionários posicionados ao redor e acima da área de voo
- 1 x Modem v5.1
- 10 x Super-Beacons – beacons móveis para dez drones
- 14 x licenças MF NIA
Se seus drones são minúsculos e não conseguem carregar uma carga de 27g (uma versão simplificada do Super-Beacon), então o Mini-TX sem bateria adicional e sem carcaça é a sua melhor escolha. Na configuração simplificada, ele pesa apenas 6,7g.
No entanto, o Mini-TX opera apenas em uma frequência (31kHz). Portanto, apenas NIA permanece como opção. Assim, se você tiver dez drones, a taxa de atualização de localização por drone será 1/10 da taxa de atualização de localização do sistema. Para um submapa pequeno de 5x5m, é possível obter 20-25Hz por sistema. Portanto, por drone, a taxa de atualização de localização será de ~2-2,5Hz. Essa taxa de atualização de localização é adequada para shows com movimentos lentos. Mas ainda assim, é muito melhor do que nada.
Configuração:
- NIA
- 4 x https://marvelmind.com/product/super-beacon/ – beacons estacionários posicionados ao redor e acima da área de voo
- 1 x Modem v5.1 – controlador central do sistema. Você pode monitorar os dados e controlar os drones por meio dele
- 10 x Mini-TX – beacons móveis para dez drones
Sistemas baseados em UWB
Os sistemas de posicionamento interno de drones baseados em UWB não diferem muito em princípio do Marvelmind Indoor “GPS”. Claro, a tecnologia subjacente é diferente (tempo de voo do UWB em comparação ao tempo de voo do ultrassom). Mas a arquitetura e os elementos de rede são muito semelhantes.
Diferenças práticas entre UWB e o Marvelmind Indoor “GPS”:
- UWB é cerca de dez vezes menos preciso que o ultrassom, ou seja, os drones ficam mais estáveis no ar
- No entanto, o UWB não é afetado pelo ruído acústico dos drones em princípio
- O UWB pode suportar mais drones ao mesmo tempo em princípio. Se o UWB suporta ou não mais drones na prática e a taxa de atualização resultante por drone depende da implementação do sistema UWB. Sistemas baseados em IA podem facilmente rivalizar com sistemas baseados em UWB em termos de capacidade e superá-los em termos de precisão por um fator de dez
Sistemas ópticos - QR codes ao redor
Torna-se cada vez mais popular devido à simplicidade potencial:
- Uma câmera voltada para baixo em direção a QR codes (ou outros padrões especiais) no chão. Os QR codes fornecem tanto a localização quanto a direção
- Os QR codes podem estar acima dos drones (tetos), se for mais conveniente
- Os QR codes podem estar ao redor do drone, mas nesse caso são necessárias mais câmeras ou câmeras especiais “olho de peixe”
Prós:
- Sistema de posicionamento relativamente acessível
- Sem necessidade de beacons ativos ao redor
Contras:
- Necessidade de QR codes ao redor – às vezes, eles são indesejados ou até impossíveis de instalar
- Requisitos de iluminação especial
- Sistema baseado em triangulação; portanto, os QR codes devem ser densos e bastante próximos, ou a precisão do posicionamento é prejudicada
Considere uma alternativa: Plataforma de pouso autônomo para drones.
Sistemas baseados em captura de movimento
Shows de drones muito impressionantes nos levam a acreditar que os drones são muito inteligentes. No entanto, essa visão é muito enganosa. O sistema de posicionamento é a joia da configuração — não os drones. Os drones são bastante rudimentares. Eles nem mesmo sabem que estão sendo rastreados. Além disso, são completamente controlados remotamente com base nos dados de localização do sistema de rastreamento. Portanto, são ainda mais simples. Mas tudo bem. Não importa como o feito é realizado, desde que a performance seja impressionante — e verdadeiramente impressionante.
Sistemas baseados em captura de movimento:
- São caros ou muito caros, pois exigem câmeras infravermelhas de alta resolução e alta velocidade, muita conexão de dados (cabeamento) entre as câmeras e o computador central, computador potente e iluminação infravermelha especial
- São naturalmente limitados na área coberta, pois a localização é baseada em triangulação, e geralmente são limitados a 10x10m ou algo similar
- Do lado positivo, os rastreadores nos drones são leves e passivos — apenas refletores de luz
Exemplos de implementação de posicionamento interno preciso, rastreamento e navegação para drones com o Marvelmind Indoor "GPS"
Rastreamento preciso (±2cm) do quadricóptero DJI Phantom em ambientes internos em 3D (XYZ)
- Rastreamento preciso em X,Y,Z (vista XY + vista XZ + vista YZ)
- Dados brutos e dados pós-processados do Player do Dashboard – observe que hoje o mesmo está disponível não no pós-processamento, mas no Player em Tempo Real
- O ecossistema DJI é fechado, pelo menos para as séries Phantom e Mavic. Portanto, é possível rastrear o Phantom, mas não voar autonomamente em ambientes internos (sem hacking mais profundo)
- Saiba mais sobre como voar com drones DJI autonomamente em ambientes internos
Rastreamento preciso (±2cm) do quadricóptero DJI Phantom em ambientes externos em 3D (XYZ)
- Rastreamento preciso (±2cm) em XYZ (vista XY + vista XZ + vista YZ) – o mesmo que acima, mas em ambiente externo
- A mesma configuração Precise-Z composta por 4+2 beacons estacionários é utilizada nesta demonstração e na anterior. Veja mais no Manual de Posicionamento
- Saiba mais sobre como voar com drones DJI autonomamente em ambientes internos
Voo totalmente autônomo em ambiente interno
- Um pequeno helicóptero voa de forma totalmente autônoma com base no Marvelmind Indoor “GPS”
Usando IA para rastreamento de drones em ambientes internos e enxames de drones internos
Com uma combinação de soluções, é possível usar IA para posicionamento de drones em ambientes internos:
- Defletor de ultrassom especial que protege o microfone do ruído das próprias hélices
- Posicionamento dos beacons estacionários claramente acima do drone
- Uso de filtros DSP especiais, agudos e estreitos
Rastreamento interno de drones pequenos e microdrones
É possível rastrear até microdrones (menos de 100g) com o auxílio dos beacons Mini-TX.
O Starter Set NIA-SmallDrone foi projetado especificamente para esse tipo de drone.
A configuração mínima para o rastreamento de drones seria qualquer conjunto NIA com capacidade 3D. Por exemplo, três beacons estacionários + 1 beacon móvel + 1 modem e a Arquitetura Não-Inversa (NIA) ou MF NIA já seriam suficientes para o drone.
Drones para inspeção de armazéns
O uso de drones para inspeção de armazéns é bastante popular — localização de paletes perdidos, segurança, etc. Sim, é uma tarefa viável, mas muito complexa na prática:
- Ambiente muito desafiador em geral
- Drones caem e quebram => alto custo de erro
- Os drones são potencialmente perigosos para voar e muito difíceis de desenvolver e utilizar
No entanto, a solução é muito promissora. Assim, desenvolvedores de drones ou de sistemas para armazéns utilizam nosso sistema de posicionamento interno para esse tipo de solução. No vídeo, explicamos as peculiaridades do ambiente (corredores estreitos e prateleiras altas), como essas peculiaridades afetam a precisão e como construir o sistema de forma otimizada.
Plataforma de pouso autônomo para drones
É possível construir uma plataforma de pouso autônomo para um drone. Ela pode até ser móvel:
- Você posiciona quatro Super-Beacons estacionários voltados para cima nas bordas da plataforma. Quanto maior a plataforma, melhor a precisão da distância
- Você instala dois Super-Beacons móveis voltados para baixo
O drone voa usando RTK GPS convencional ou até mesmo GPS quando está longe e a até 30m da plataforma. Ele é sincronizado com as coordenadas do Indoor “GPS” e pousa com base nessas coordenadas. Como mencionado, a plataforma pode ser estática em relação à Terra ou estar em movimento. Isso não importa para o drone. Assim, você pode pousar com precisão em um veículo em movimento, por exemplo.
Voo autônomo por nossos clientes
Voo autônomo por nossos clientes com Pixhawk + Marvelmind
"Posso voar com o DJI Mavic autonomamente em ambientes internos?
Sim, você pode.
Saiba mais sobre como voar com drones DJI autonomamente em ambientes internos.