Marvelmind Users and Case Studies
Nearly all larger cases and the vast majority of commercial cases where Marvelmind Indoor “GPS” is used are under NDAs, unfortunately. Thus, they are challenging to share. Below we list those public cases we have found on the internet.
Table of Contents
Universities and researchers are among the most popular users of the Marvelmind indoor positioning system. We even have a dedicated page for solutions for universities.
Check it out to see more and be inspired. Perhaps you can even find a log of your university among our users.

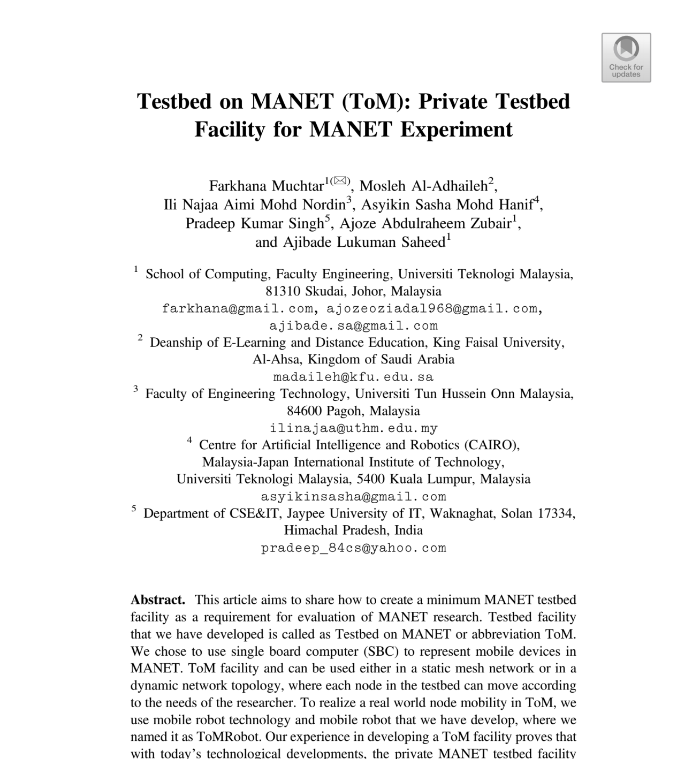
The task was to precisely track 120+ forklifts in a warehouse to optimize their performance, improve the understanding of the usage and automatically allocate the job to each forklift in real time based on its current location. The case is a continuation of an earlier deployed case with 10 forklifts. A new and larger warehouse with 12 times more forklifts
Configuration:
- Each forklift is equipped with an Industrial-RX with Omni (in the earlier warehouse, it was a Super-Beacon with Omni-Microphone) installed on a roof like an antenna for the broadest and most confident coverage with the minimal number of stationary Super-Beacons. Industrial-RX with Omni was developed specifically for this case because conditions on site are pretty industrial—dust, temperature swings, etc.
- There are 123 stationary Super-Beacons installed on ~3-4m level on the wall to provide the coverage for the 450x450m T-shape warehouse
- There is a powerful ~110 to +12V converter to supply the stationary Super-Beacons. Each Super-Beacon has a +12V to USB converter next to it. The powering is done with a two-stage approach because it is significantly less expensive to arrange a +12V electricity grid than a ~110V electricity grid in the warehouse
- A new Multi-Modem Architecture was used to provide proper radio coverage and overall capacity of the network.
- The location data is streamed from the Super-Super-Modem to a remote customer’s computer via UDP, where they run their analytics and show the tracking and results via their own GUI. The customers control our system via an open API
- The system was remotely deployed by Marvelmind, with physical installation done by a 3rd party integrator hired by the customer locally
The task was to precisely track 10 forklifts in a warehouse to optimize their performance, improve the understanding of the usage and automatically allocate the job to each forklift in real time based on its current location.
Configuration:
- Each forklift is equipped with a Super-Beacon with Omni-Microphone installed on a roof like an antenna for the broadest and most confident coverage with the minimal number of the stationary Super-Beacons
- There are 14 stationary Super-Beacons installed on ~3m level on the wall to provide the coverage
- There is a powerful ~110 to +12V converter to supply the stationary Super-Beacons. Each Super-Beacon has a +12V to USB converter next to it. The powering is done with a two-stage approach because it is significantly less expensive to arrange a +12V electricity grid than a ~110V electricity grid in the warehouse
- The location data is streamed from Modem v5.1 via a local PC (basic laptop) to a remote customer’s computer via UDP, where they run their analytics and show the tracking and results via their own GUI
- The system was remotely deployed by Marvelmind, with physical installation done by a 3rd party integrator hired by the customer locally. Though the integrator made mistakes in installing the beacons in the wrong places, due to the flexibility of the Marvelmind Indoor “GPS” system, we were able to re-make the Network Plan and fit into the locations of beacons erroneously done by the integrator
The original video:
Detailed comments and explanations on how the system was built:
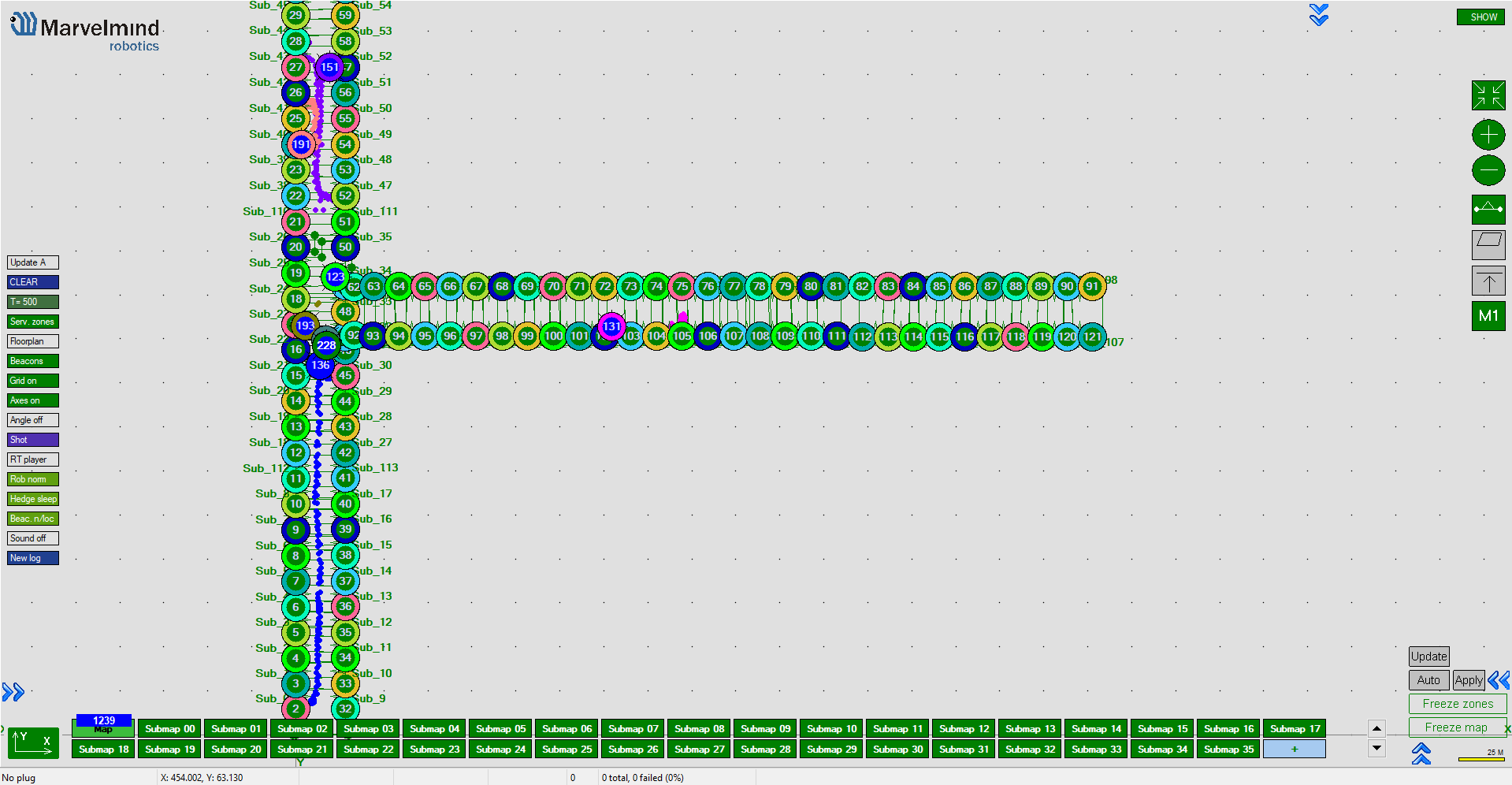
The task was to precisely track 38 workers of a precast concrete plan for productivity and safety.
Configuration:
- Each worker is equipped with a modified Marvelmind Jacket: https://marvelmind.com/product/jacket/
- There are 16 stationary Super-Beacons-Outdoor with removed batteries installed on 4-6m on the wall to provide coverage. The batteries were removed to operate in negative temperatures. Each beacon is installed on a special ball holder and powered with a ~220V to USB converter
- The location data is streamed from our Super-Modem via UDP over WiFi to the customer’s computer, where they run their analytics and show the tracking and results via their own GUI
- Marvelmind remotely deployed the system with physical installation done by the workers at the factory based on our Network Plan and under our remote supervision
The original short video:
Detailed comments and explanations on how the system was built::
Podcast: “On Hedgehogs and Marvelous Minds: A New Technology for Point Data Collection? – Ep 179“
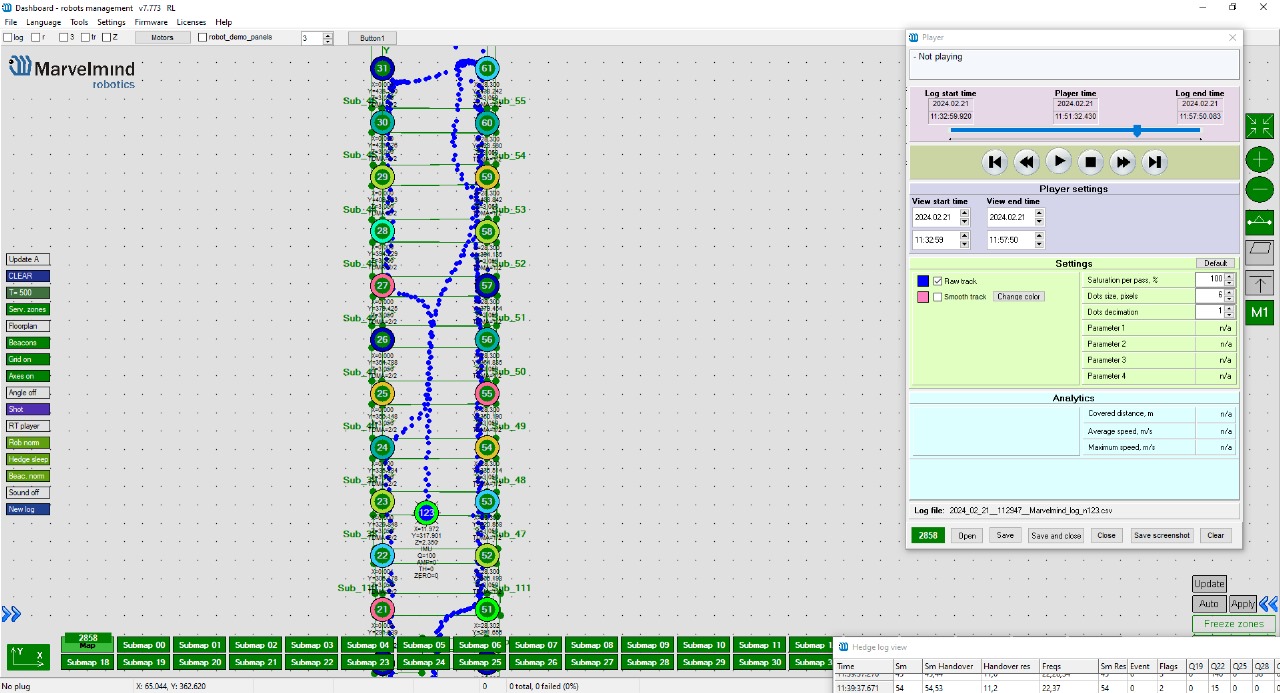
“The researchers in the article we discuss used an indoor positioning system (IPS) to map an outdoor site in Israel. Their results are encouraging for this emerging technology.”
Original article: “On Hedgehogs and Marvelous Minds: A New Technology for Point Data Collection?” (PDF).
They were published online by Cambridge University Press on 20 October 2021.
“The collection of 3D point data is a common bottleneck for archaeological excavations despite an increasing range of powerful spatial data collection technologies. Total stations often require a dedicated operator, and they are optimal for excavation-level data collection over relatively short line-of-site distances. Precision Global Navigation Satellite Systems (GNSS) require reliable communication with constellations of distant satellites and may not be accurate enough for all data recording contexts. A new category of spatial data collection hardware, called Indoor Positioning Systems (IPS), or “indoor GPS,” has the potential to provide a more cost-effective and efficient approach to the collection of point data during excavations by making 3D point data collection widely available and accessible.
Additionally, such systems may allow greater detail in digital field data recording by enabling the collection of shape data via continuous recording. In this article, we present one such IPS system—the Marvelmind IPS—discuss its potential value and limitations, and provide a case study of a field test of the system at the Chalcolithic (4600–3600 BC) site of Horvat Duvshan, Israel.”
The original video:
Our comments on the robot and the Indoor “GPS” in it:
Abstract: Expert drivers have the skill to perform high side slip maneuvers, like drifting, during racing events to minimize lap time. Due to the complex dynamics of these maneuvers, transient drift is difficult to model and to control in autonomous vehicles.In this paper, the authors present a mixed open-loop and closed-loop control strategy to perform a transient drift-corning trajectory. The reference trajectory is generated from a ruled-based algorithm. We validate the planning and control techniques in simulation using Simulink/Carsim, and experimentally using an open source, low cost 1/10 scale RC car.
Keywords: Autonomous vehicles, Vehicle dynamics, Rule-based path planning, Drift control
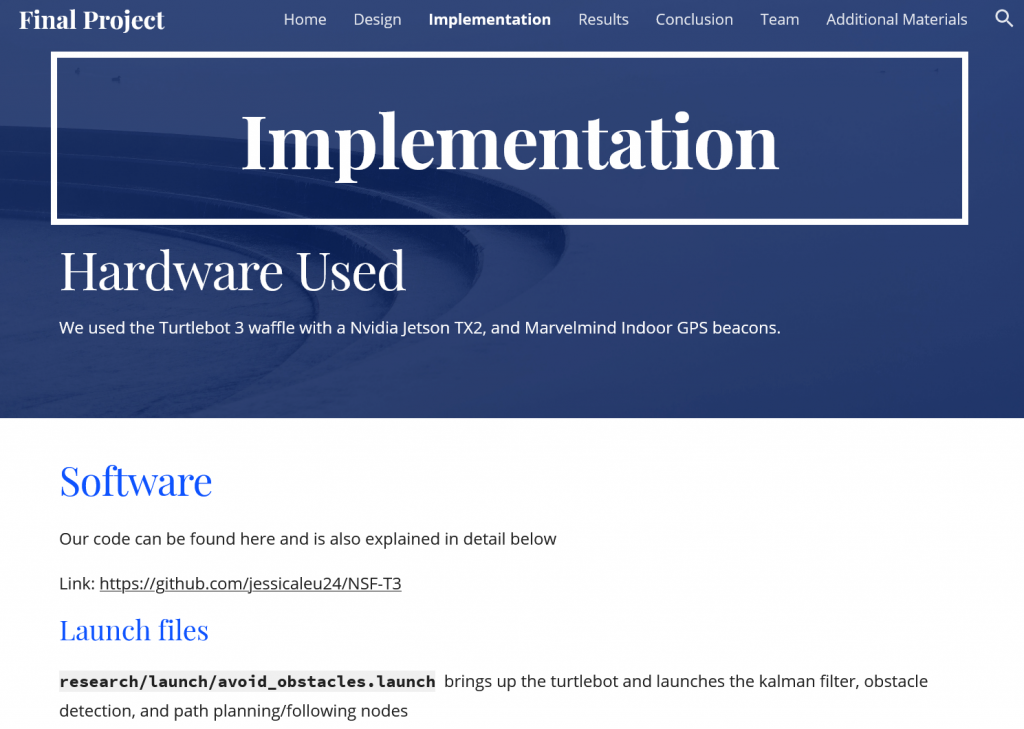
The project used the Turtlebot 3 waffle with a Nvidia Jetson TX2, and Marvelmind Indoor GPS beacons.
The project link.
The downloaded page.
Abstract
Planning and Control of Drift Maneuvers with the Berkeley Autonomous Race Car
by Jon Matthew Gonzales
Doctor of Philosophy in Engineering – Mechanical Engineering
University of California, Berkeley
Professor Francesco Borrelli, Chair
In competitive sporting events, drivers operate vehicles at the limits of handling, with near full rear tire saturation. Expert drivers intentionally drift their vehicles around corners to turn the vehicle quickly. These drivers operate their vehicles in a way that is contrary to the way safety systems in automotive electronic control units are designed. By investigating and understanding the physics and operating principles of these maneuvers, it may be possible to enhance safety features in automotive control systems for collision avoidance, as well as enable sports cars to autonomously perform drift within the context of racing. The main focus of this dissertation is on planning and control of drift maneuvers, in particular, steady state drift, drift parking, and drift cornering.
Secondly, with the growth of research and engineering in the domain of autonomous vehicles, the dissertation also focuses on the design and development of a robotic platform called the Berkeley Autonomous Race Car (BARC). The platform is based on a 1/10-scaleremote control vehicle equipped with computing hardware and a suite of sensors that make it suitable for research and instruction. The project aims to provide a low-cost, open-source test bed option for researchers and instructors interested in autonomous vehicles. The methods and algorithms provided in the first part of the dissertation are experimentally validated on the BARC platform.
Evaluation of Low-Cost/High-Accuracy Indoor Positioning Systems
A comparison of Marvelmind Indoor “GPS”, UWB-based and optical tracking systems by independent researchers. A link to the PDF article.

Marvelmind Localization
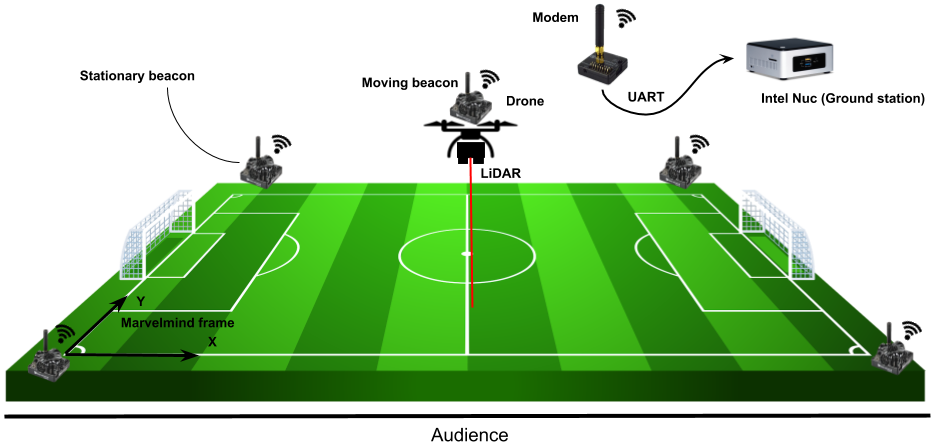
Marvelmind Robotics is a company that develops an off-the-shelf indoor GPS. Indoor localization is achieved with the use of ultrasound beacons. In this application, four stationary beacons are placed at a height of around 1 meter at all each corner of the robocup field. A fifth beacon is attached to the drone and connected to the drone’s on-board power circuit. This beacon is known as the hedgehog or hedge for short. The hedgehog is a mobile beacon whose position is tracked by the stationary beacons. Pose data of the four beacons and the hedgehog are communicated using the modem, which also provides data output via UART. In this application, the pose data for the hedgehog is accessed through the modem using a C program. This program accesses the data via UART, decrypts the pose data and broadcasts it to the MATLAB/Simulink file via UDP. All of this is executed on the Intel Nuc. The co-ordinates derived from the Marvelmind setup was mapped to the NED co-ordinate frame used by the Pixhawk.
Autonomous Flight
This section explains how the on-board Pixhawk was used to fly the drone autonomously.
The actions taken by the Pixhawk are dictated by the messages it receives through the Mavlink message protocol. The Mavlink messages were generated in Matlab Simulink running on an off-board Intel NUC computer and were communicated to the Pixhawk via telemetry. The telemetry connection was established through connecting two telemetry modules, one to the telem2 port of the Pixhawk and the other to the Intel NUC computer via USB. One Mavlink message is sent and another is received in every iteration of the Matlab Simulink simulation. Each Mavlink message sent to the Pixhawk include the position estimations taken from the Marvelmind setup and a required set point. The setpoint represents the target location that the Pixhawk, and subsequently the drone, is required to move to. The Mavlink message received include information regarding the drone’s current pose and positions. This information was received to be used in planning the drone’s path by deciding upon the set points sent to the Pixhawk.
The article can found here.
Indoor localization and path planning for ToMRobot
An example of usage of Marvelmind Indoor “GPS” for an autonomous robot. See more via the link.