Home » Indoor positioning system for drone swarms
Summary
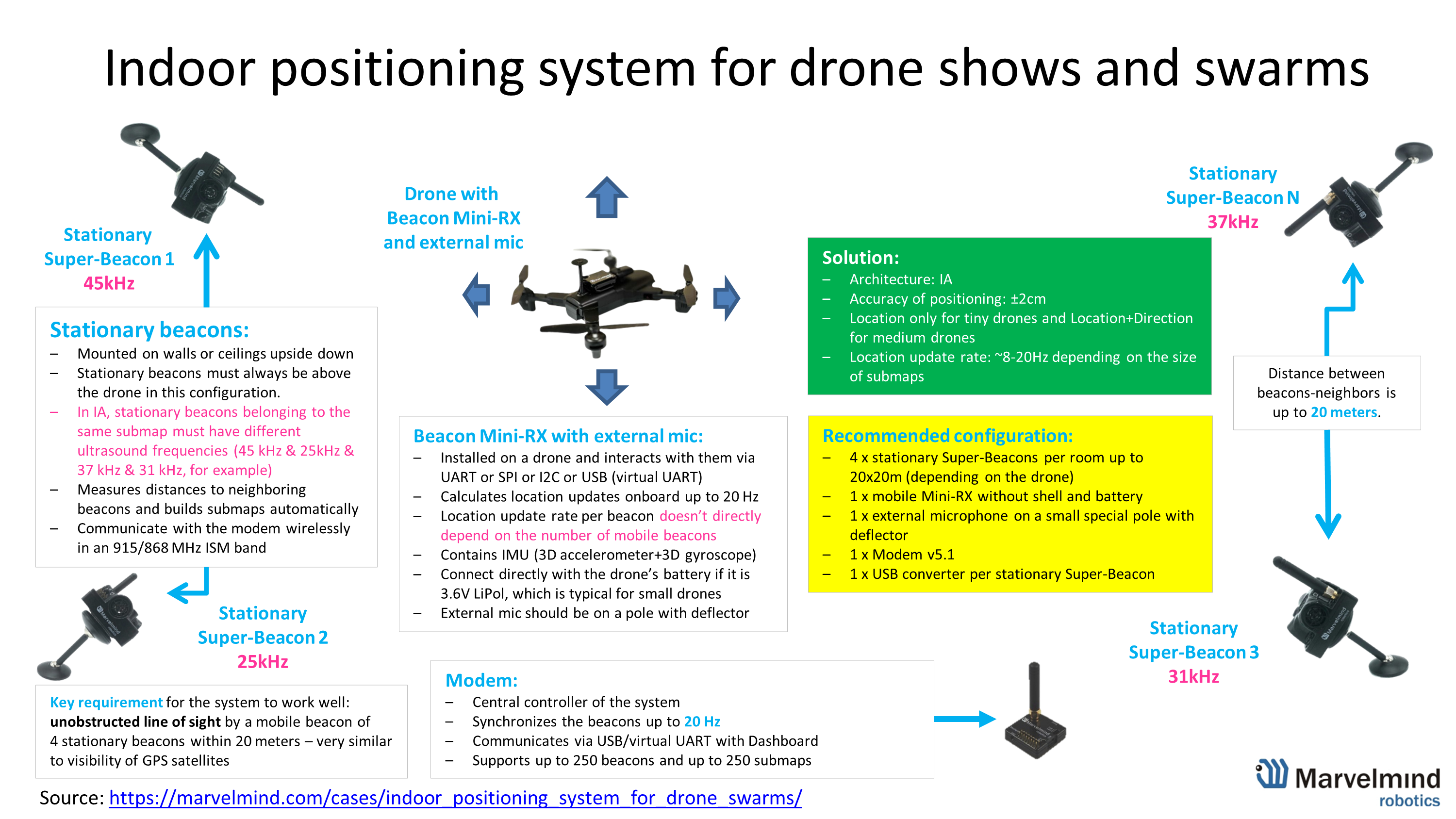
Indoor positioning system for drone shows and swarms.
- Task
- Total Area
- Quantity of drones
- Autonomous
- Usage
- Tag weight
- Skill requirements
- Costs per system
- Costs per drone
- Drones swarms/shows
- Multiple submaps of <15x15m
- Up to 250 drones
- YES
- Indoors and outdoors
- ~10-12g (w/o battery)
- Low to high
- ~500-1000 EUR
- ~150 EUR
Examples



Task
To provide precise indoor positioning coordinates for drone swarms and drone shows.
Problem
The key difference between an indoor positioning system for a drone scanning objects in a warehouse, for example, and an indoor positioning system for an indoor drone show or an indoor drone swarm research project is the number of drones involved.
To track one or two drones is not a problem because multiple options are possible: NIA, MF, NIA, IA. See more: basic comparison of system architectures.
But for drone swarms consisting of 8-16 drones, only MF NIA and IA are suitable in practice. With the number of mobile objects (drones) more than that, only IA is a viable option. It happens because NIA is using the TDMA approach, and the location update rate per drone for 16 drones would be only 1/16th of the location update rate per system. With a typical location update rate of 8-16Hz, the location update rate per drone would be only 0.5-1Hz, which is very low.
With IA, the location update rate per drone doesn’t directly depend on the number of drones. It can be 8-20 Hz/drone, depending on the size of the submap and other settings.
Solution
The precise indoor positioning solution for indoor drone shows and swarms is a combination of proven solutions:
Previously, we had always advised against using IA with drones, as the propellers’ noise would severely limit the range of the IA system. In an IA system, mobile beacons are listening to the ultrasound pulses of the stationary beacons. Since the stationary beacons are far and their signal is weak, the propellers’ noise would mask the ultrasound signal from the stationary beacons and break the system.
However, a combination of technical solutions, such as using sharp DSP filters, placing the microphone above the propellers, and concealing the microphone behind a specialized ultrasound deflector, helps to overcome this limitation. These are the know-how that we introduce with this new solution.
See the photos on the left for more details. Notice the external microphone, microphone pole, and microphone deflector. Stationary beacons must always be above the drone in this configuration.
Recommended configuration
Notes
Direction
- All other aspects of connectivity with external systems, for example, PixHawk autopilot or similar autopilots is not different for IA-based indoor positioning system from other systems. UART or virtual UART over USB is the easiest way
- Since external microphones and microphone poles are small, even very small and light drones can carry them. The only limitation would be the size of the base -the distance between the microphones. The larger the better, obviously. The static angular error can be calculated based on the assumption that each microphone's position is measured with ±2cm accuracy. Since the microphones are very small and it is possible to enable TX4/RX4 only on the the stationary beacons, it is possible to increase the accuracy of positioning and in such a way the static angular accuracy as well
Power supply to Mini-RX
- Connect directly with the drone's battery if it is 3.6V LiPol, which is typical for small drones.
- Connect via a light DC-3.6V or DC-5.0V converter if the drone's battery differs from 1-cell LiPol (3.6V).
- Generally speaking, having a DC-DC converter helps if the drones battery's voltage drops due to the motor's current or noise.
- Sometimes, the easiest solution is to replace the default battery of Mini-RX with a light 100mAh battery that would last significantly longer than the drone flies
Power supply to stationary Super-Beacons
Comparison with NIA and MF NIA
- The recommended IA architecture is not NIA. because in NIA, the location update rate per drone would too low in drone swarm configurations since in NIA location update rate per drone drops proportionally to the number of drones - TDMA approach
- MF NIA is a good alternative for particularly noisy drones when there are up to 8 drones or so. Then, the location update rate per drone starts dropping like in NIA albeit 8 times slower. Besides, for MF NIA, Super-Beacons must be used as mobile beacons and they are notably larger than Mini-RX. And for MF NIA, you need a special MF NIA license
Skill requirements
Drones with propellers facing down
Some drones have propellers facing down, and the drones are relatively large. This creates an opportunity to install Super-Beacons in the Paired Beacon configurations right above drones – similar to the RTK GPS antennas that can be seen.
- The beacon’s body will create a natural ultrasound deflector for the noise of propellers and motors, so that no additional ultrasound deflectors are required
- It is a theoretical note and a recommended solution, and it is a subject of practical testing to learn the maximum distance the IA will still work well. Because there is certainly a distance when the signal/noise ratio will drop below a limit and the tracking won’t be reliable anymore. The testing is quick and straightforward, with the help of an Oscilloscope embedded into the Dashboard. You will literally see in the Oscilloscope the noise of the propellers after all the shielding and filtering, as well as the ultrasound signal from the stationary beacons. It takes minutes to perform such verification tests
