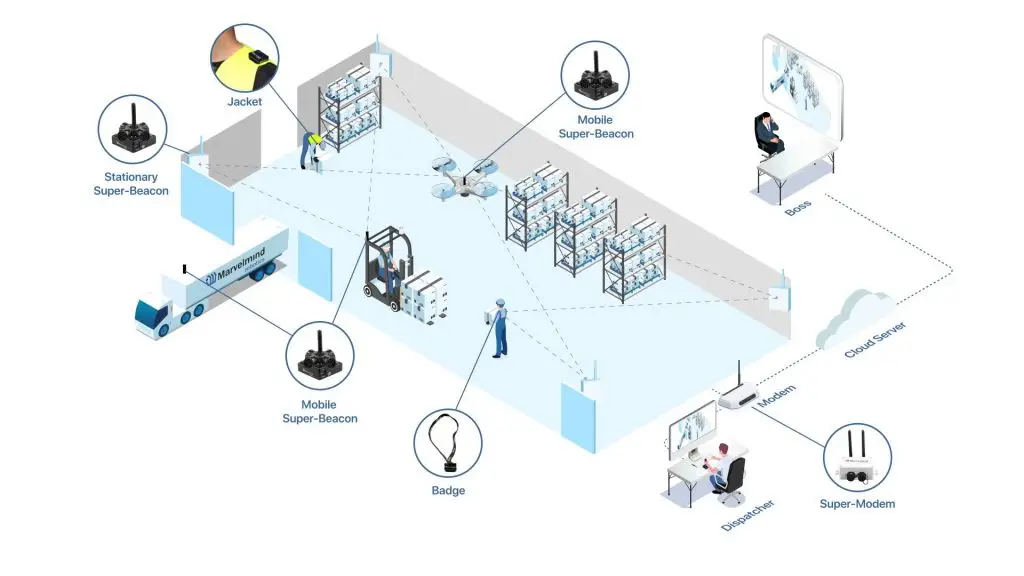











I'm a big fan of the Marvelmind indoor positioning system, which is inexpensive, accurate (2cm) and quite easy to use. They've now put together a tutorial page on how to use it with drones, both PX4 and Ardupilot
We have received the Starter Pack and are excited to start development!
We got tracking working with a basic 4 stationary beacon NIA setup.
We also got position feedback of the hedgehog in ROS2!
So far we are very impressed with the product and all the online resources.
Thank you for the help you have given as well.

Thank you.
I have to say that we are impressed with the system and its capabilities.
We wanna move on to get the data over RS485 to our controlling PLC

We have been evaluating these units for our autonomous warehouse drone system since our initial purchase last November. The hardware has proven to be a great fit for our purpose.
We are impressed with the performance so far and are eager to scale our system using Marvelmind's technology.