FAQ
System capabilities
Yes, of course!
Here are a few examples:
- Precise (±2 cm) indoor tracking in XYZ without GPS/GLONASS
- Precise (±2 cm) drone tracking outdoor without GPS/GLONASS – horizontal flight on two echelons
- Demo: accurate height tracking
The primary requirement for 3D (XYZ) tracking is a direct line of sight or hearing between the mobile beacon and three or more stationary beacons within a 30-meter range. You can build multiple submaps (cells), thus covering as large an area as you wish, for example, a huge 200,000 m2 warehouse, and fly scanning drones there.
Yes, see: How to get direction/orientation
The Paired Beacon feature is supported in both IA and NIA:
In general, we strongly recommend against using magnetometers indoors. There are nearly always magnetic materials (iron, alloys) around or wires with current that would heavily distort the Earth’s magnetic field and ruin the magnetometer readings.
In some cases, you can survive with a single mobile beacon, but it is more complex.
Yes, the Paired Beacon feature is supported in both IA and NIA:
We are using Omni-Microphones connected to Super-Beacons in our own robots, and it is a recommended solution for your robots as well:
Please start with this article: How to increase the accuracy of the precise indoor positioning system.
Yes, it is possible by using the Real-Time Player (RTP) with more averaging. You can quite easily get sub-cm. However, the latency will increase as well. For example, instead of regular latency of 1/8 sec for the 8Hz update rate, you shall expect 5-16 x 1/8 sec ~1-2 sec latency, which depends on the level of filtering selected in the RTP. Examples:
First of all, it is important to distinguish between the distance limitations due to ultrasonics and the distance limitations due to radio.
Using submaps of up to 30m each, due to ultrasonic distance limitations, the maps can be up to 1km (500m in each direction from the modem) in size, with full-size antennas, and in open spaces with little or no radio interference.
Beacons measure distances using ultrasonic pulses. Thus, the ultrasonic line of hearing/line of sight is a must inside a submap; between the submaps, not necessarily. It depends on the map. The regular recommended maximum distance between beacons in one submap is up to 30m. However, you can have multiple submaps and create large maps that span a few hundred meters in length and tens of thousands of square meters.
With the Marvelmind Horn in 1D, it is possible to achieve a maximum ultrasonic distance of up to 120m on one submap – a great option for tunnels or surveying, for example.
The modem communicates with beacons using radio in a license-free band (868 MHz or 915 MHz). Line of sight is not required for radio communication. The maximum distance depends mostly on the antennas:
- For embedded antennas – up to ~50-100m or less
- For the default 50mm antennas – 100m+
- For the full-size antenna – up to 400m+
All distances are give for the open space and antennas are parallel to each other.
The maximum distance in radio through walls completely depends on the type of the walls and can be significantly shorter than the figures above. For example, it may be rather difficult to cover even several floors. But walls on the same floor can be less of a problem, because, they are often thinner and radio transparent, particularly in the office environment. The walls are typically thicker and produce more attenuation in industrial or warehouse environments.
See more:
Yes, all currently produced Marvelmind beacons have a 6D IMU onboard.
No, of course, it doesn’t rely on real GPS because GPS doesn’t work indoors, the satellites are not visible, and real GPS usually gives 5-10 m accuracy while our Indoor “GPS” gives ±2cm.
However, Marvelmind Indoor “GPS” or Marvelmind Indoor Positioning System or Marvelmind RTLS – whatever name you prefer – is very much like GPS for the end-users, and this is why:
- The system streams location data in the NMEA 0183 – native GPS format. So, you need to physically connect to your robot, drone, or GPS-enabled system with external GPS input. Your robot/drone/system is already integrated with Marvelmind Indoor “GPS”. That is it. Everything is done. Your robot will believe that it is GPS connected, but to a marvelous GPS that works indoors and gives ±2cm precision instead of the usual 5-10m
- Like GPS, the system requires a line of sight from your mobile beacon (“the GPS terminal”) to the stationary beacons (“the GPS satellites”). The GPS needs at least four satellites. We request 1 stationary beacon for 1D tracking, 2 for 2D tracking, and 3 for 3D tracking. We always recommend redundancy for more resilience against obstructions—N+1 or 2N configurations of stationary beacons.
There is no architectural difference between working indoors and outdoors. Yes, it does work outdoors as well as indoors.
See the Outdoor local position system article for more details.
Outdoor versions of beacons and modems are typically more ingress-protected up to IP67 level:
- Super-Beacon-Outdoor IP56 tests
- Super-Beacon-Outdoor
- Modem v5.1-Outdoor
- Industrial Super-Beacon-Plastic
- Industrial Super-Beacon-Metal
- Beacon Industrial-RX
- Beacon Industrial-TX-Metal
- Mini-RX-IP67
- Omni-Microphone-IP67
- External Microphone-IP67
See outdoor usage examples:
It can. We have had cases where a robot was carrying not only a mobile beacon but also a modem
How to choose
We have three main architectures:
- Inverse Architecture (IA)
- Non-Inverse Architecture (NIA)
- Multi-Frequency MF NIA
See the architecture comparison video.
1) IA is most suitable when you have multiple (~ >5 mobile objects) and when the location update rate is important. Also, IA should be your choice when you want a mobile beacon noiseless because regular ultrasonic transmitting beacons “tick”. You cannot hear the ultrasonic, but you can hear a quiet tick.
See examples:
2) NIA is designed when you have noisy mobile objects, but a few of them, for example, 1-2 inspection drones in a warehouse. Another great benefit of NIA is that it is effortless to deploy – significantly simpler than IA, particularly for larger maps consisting of many submaps. Thus, starting with Marvelmind, you may choose NIA initially, but it depends on your use case. For small maps of 1-3 submaps, IA and NIA are equally simple. Typical demos:
- Precise (±2 cm) indoor tracking in XYZ without GPS/GLONASS
- Precise (±2 cm) Indoor Navigation in a noisy environment
3) MF NIA combines the best of IA and NIA. You can have up to 5 times higher update rates for noisy objects than in NIA. Typical demo:
Find out more about the architectures in the Architectures Comparison.
We used to have two hardware variants for some products:
- 915/868MHz
- 433MHz
Please, always check your local regulator as the best source of information. Ask about license-free bands or ISM bands, or SRD bands.
Currently, we have products working only in the 915/868MHz band. However, for orders starting from 100 units, we are ready to produce a 433-MHz or other frequency variants. For example, Mini-RX, Super-Beacons, Industrial beacons/modems, and their derivatives (Helmets, Jackets, etc.) are currently available in 915/868MHz only.
Notice that 433MHz or 868MHz, or 915MHz is a band name – not a frequency. For example, Marvelmind HW supports 915/868MHz band supports frequencies ~860-930MHz. It means, for instance, that for Japan, we recommend the 915/868MHz harware, but the actual frequencies that will be used are 920.5-923.5MHz – according to the radio law of Japan.
- License-free ISM band 915 MHz for the US and countries in Region 2 (https://en.wikipedia.org/wiki/ITU_Region)
- License-free SRD 868 MHz band for the EU and other countries (https://en.wikipedia.org/wiki/Short-range_device#SRD860)
Recommendations for some countries based on our knowledge:
- Australia: 915MHz (SRD)
- Brazil and South America: 915MHz
- Canada: 915MHz (ISM)
- EU: 868MHz (SRD)
- India: 868MHz
- Indonesia: 915MHz
- Japan: 915MHz
- Korea: 915MHz
- Russia: 868MHz (SRD)
- Singapore: 915MHz
- Taiwan: 915MHz
- Turkey: 868MHz (SRD)
- UAE: 868MHz (SRD)
- UK: 868MHz (SRD) )
- US: 915MHz (ISM)
- Vietnam: 915MHz
Notice that regulations change and evolve. Thus, check the latest regulation in your country.
As of 2025, we don’t produce the 433-MHz version anymore (still possible to order starting from 100-200-pcs batch), since the same 868/915-MHz variant can cover both ISM bands in the US, Japan, and a few other countries operating in the 915-MHz band and the SRD band of 868 MHz in Europe. You need to choose a correct radio profile in the Dashboard.
- Yes, it does
- Super-Modem = Modem v5.1 + single-board Linux computer (Raspberry Pi Zero W) + RS485 support + more rigid housing
Setup
Key steps for the first setup:
- Operating Manual – there is a very detailed step-by-step guide
- Unpacking Starter Set Super-MP – the same steps in the video, based on the example of our most popular set
- Downloads page – the same key steps and key links
In very short:
- Update the software on all beacons and modems you have received, and install the Dashboard from the same software pack
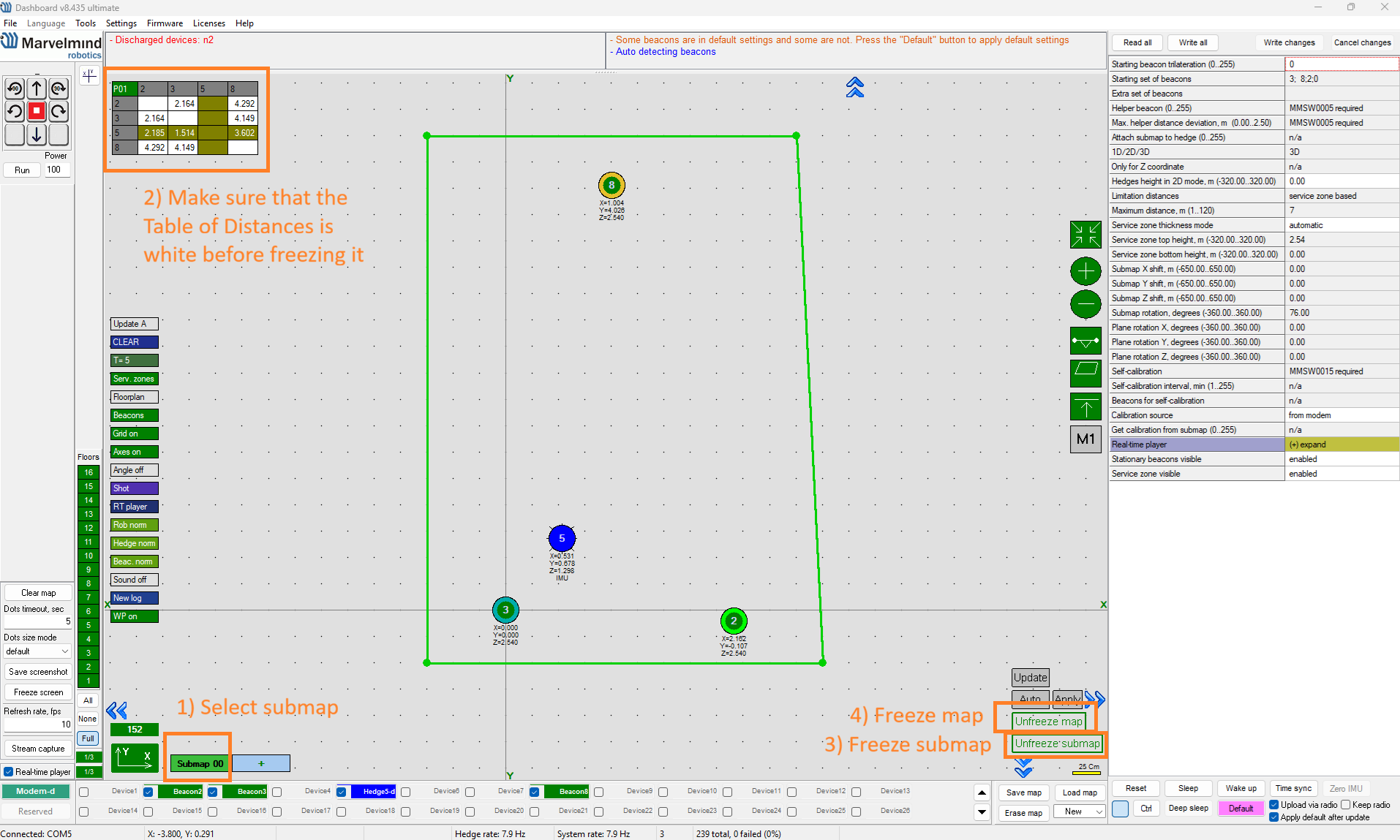
- Place the beacons in 2D according to the Placement Manual
- Make sure that the table of distances is white in the Dashboard
- Freeze the submap and then the map
- Enjoy the tracking. Always remember that the line of sight between the mobile beacon and the serving stationary beacons is a must
- If you struggle, avoid typical mistakes, and A long list of mistakes and how to avoid them
{kind=link}
Software
- Go to the Downloads page
Download the latest SW pack. It contains all Marvelmind Indoor “GPS” SW, including the Marvelmind Dashboard
- Unzip and install the Dashboard from the archive
Interfaces and integration
Yes, please see Downloads page.
Yes, please see the Downloads page.
Yes, we support all three. Please see the Downloads page.
For more information, check the Drones page.
Yes, you can easily use your own GUI and integrate Marvelmind Indoor “GPS” into your system. We have API for both Windows and Linux. Download them here.
Ordering
Yes, check the How to purchase page.
Additionally:
- Please send us an email at info@marvelmind.com and describe your needs and requirements. If you have selected your products or sets, share the links from our Product page and list the desired quantities
- Share your contact name, company name (if any), contact phone number, and other details that you wish we mention in the invoice, for example, VAT number, project name, etc.
- We issue the invoice on the same working day
- You pay via bank transfer (in USD, EUR, GBP, or a few other currencies)
- We wait for the payment to arrive (typical seconds for IBAN transfer to 1-2 days for SWIFT transfer), and the we ship
Other
Yes, they can be downloaded from the Download page.