
Other Marvelmind sources of help related to drones
Recommended indoor RTLS for drones - quick hints
When you are new to the Marvelmind Indoor “GPS” system and are unsure what to choose, get the Starter Set Super-MP, where MP stands for multi-purpose, and that would be your safest choice.
For more details, refer to the recommended options below.
Overall the best and safest choice when you are not sure what to choose or what exact experiments you will run, but you want to simultaneously have the greatest flexibility and performance.
It is the best choice when you need to connect to PixHawk because two pins for the connection to PixHawk are readily available on the Super-Beacon. See more.
The set is designed for micro-drones (under 100g): the Mini-TX mobile beacon is tiny and light, with 15-20m of range to the stationary beacons, sufficient for most real cases.
An advanced version of the “Starter Set Super-MP-3D + Super-Beacon, Location+Direction on the drone” option.
The Precise-Z, which physically consists of 2 additional stationary beacons, gives the possibility to have precise Z coordinates in all ranges of Z. See more: Placement Manual, Precise-Z slide and video explanation about Z and placement of beacons.
Using Marvelmind Indoor "GPS" for drones and quadcopters
Marvelmind indoor positioning system or Marvelmind Indoor “GPS” is widely used for drones or quadcopters in many different ways:
- Guiding autonomous indoor drones and outdoor drones. Outdoor drones: guiding for “the last mile,” which can be hundreds of meters, if needed, but the maximum distance from the mobile beacon on the drone to three or more stationary beacons serving the mobile beacon must not exceed
- Tracking indoor drones
- Automatic indoor and outdoor drone landing or drone landing assistance
- Warehouse inspection using autonomous indoor drones
- Drone shows

Flying DJI drones autonomously indoors
DJI drones are the most popular drones in the world. For DJI drones indoors, there is a dedicated page: How to fly a DJI drone autonomously indoors?
The DJI ecosystem is closed, at least, for the Phantom and Mavic series. Thus, it is possible to track the Phantom but not fly autonomously indoors (without deeper hacking).
Read here to learn how to choose between DJI and Pixhawk.

Marvelmind Indoor "GPS" supports PixHawk with ArduPilot and PX4
Marvelmind Indoor “GPS” supports both PixHawk with ArduPilot and PX4:
Using a combination of Marvelmind Indoor “GPS” and PixHawk is the easiest and quickest way to fly indoors autonomously.

Indoor positioning system for small autonomous drones

The indoor positioning system for a small drone is not significantly different from other indoor positioning systems, such as those used for larger drones or other 3D (XYZ) indoor positioning systems.
The only peculiarity is the weight of the mobile beacon (tag) installed on the drone. It is solved using a stripped-down version of Mini-TX, which involves removing the shell, removing the battery, or replacing it with a very lightweight battery.
Additionally, smaller drones are often basic: they lack an onboard computer or autopilot, for example, such as Pixhawk and similar models. All intelligence comes from the ground station. However, there are exceptions.
Learn more about small dronesIndoor positioning system for drone shows and drone swarms
Drone swarms and drone shows may include tens or even hundreds of drones. When they fly outdoors, RTK GPS performs very well. But RTK GPS doesn’t work indoors. As soon as we move indoors or other GNSS-denied areas, forget about the GPS (GLONASS, Beidou, Galileo, etc.)
A typical indoor positioning system for drones would rely on NIA, a mobile beacon in NIA emits ultrasound. However, in this case, the practical number of supported drones would be 1-8, because with NIA, the location update rate per drone drops proportionally to the number of drones.
IA shall be used if the indoor drone swarm consists of dozens of drones. However, in IA, the mobile beacon is listening to the ultrasound; therefore, special solutions must be used to combat the noise from propellers and ensure the system functions properly. Learn more about the solution.

Tracking one indoor drone in one large open space is very easy. With a Starter Set Super-MP or Starter Set NIA-SmallDrone, the precise 3D tracking system can be set up in 10-15 minutes, including unpacking and software updates, on a set that has just been received. If you have completed all initial software updates before setup, the system can be deployed in under a minute.
Autonomous flight is a significantly more complex task because you need to precisely track a drone and integrate its autopilot with the drone/chassis, which is typically made from different parts (chassis, motors, motor drivers, telemetry, remote control). And on top of this, the autopilot must be integrated with the indoor positioning system as described above.
If autonomous flight by a single drone is a challenging task, then autonomous flight by a swarm of drones is the pinnacle of this complexity pyramid. It is even more challenging, but still doable if you do it one step at a time.
Small drones are too small. Large drones are too large
Having a massive swarm of small drones and playing a nice show would be great. However:
- Battery size vs. show time vs. drone size
- Autopilot and the indoor positioning system have a non-zero mass. There is a limitation on the bottom on the size of the drones
- Drones need direction. Direction is best achieved by two or more location points on the drones. The farther they are, the better angular accuracy
If drones are too big:
- It is difficult to keep them separate. You need a larger safe distance between them and, as a result, a larger space for the show
- Larger drones are heavier, noisier, and more dangerous. Noise and protection nets can ruin the whole idea of the show
Keep drones believing they are alone
In many cases, it is possible to set the autonomous flight by multiple drones so that they are not even aware that there are other drones around. They believe they are so unique and so exceptional. It is in your interest to keep them in this naive belief because it is the simplest way to make drone swarms.
As discussed above, the first thing to decide is whether you need direction based on the Paired Beacons. If you need, then you need two mobile beacons per drone. If you don’t need it, only one mobile beacon per drone.
Recommended configuration for indoor drone shows
With IA, the location update rate per drone does not depend on the number of drones: 8 to 20 Hz per drone even for large swarms. The propeller noise is overcome by sharp DSP filters, a microphone placed above the propellers, and a specialized ultrasound deflector. MF NIA remains a good alternative for particularly noisy drones when there are up to 8 drones or so
Autonomous drones for automated scanning and inspection
We are approached with requests for autonomous drones or indoor positioning systems for autonomous indoor drones, primarily for warehouse inspection, automated barcode scanning, or RFID reading, weekly.
There is undoubtedly a solid need for the task and a strong interest in fulfilling it using drones.
Building such a system for real-life applications is a complex but doable task. Let’s discuss the details of the implementation.
Fragility of the solution is the most significant practical concern. However, there are solutions and even robust alternatives.
Learn more about automatic scanning solutions
Build indoor positioning system for quadcopters properly
There are several but rather simple aspects that have to be taken into account to fly indoors successfully:
Basic and practical recommendations for setting up of Indoor “GPS” system for usage with autonomous copters/drones indoor and outdoor
Practical advice and examples of how to mount the Marvelmind Indoor “GPS” system to achieve the best performance in different applications and configurations
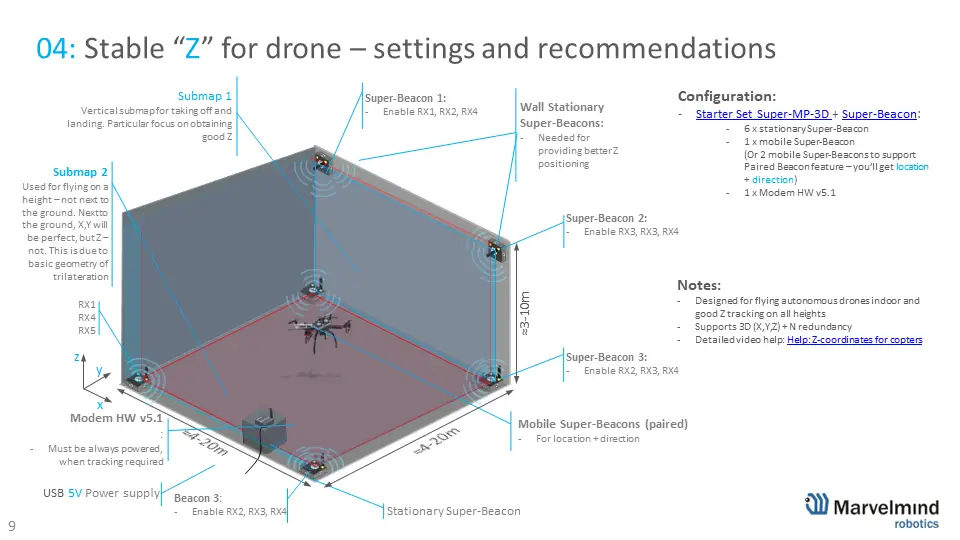
YouTube video explaining how to place the stationary beacons properly to achieve good Z accuracy. If you can’t use the advice because your environment doesn’t allow you to use the Precise Z configuration with 4+2 stationary beacons. Remember, that this configuration is recommended only for advanced users and only when a far more basic, robust, and even more accurate setup with four stationary beacons above the flying area cannot be used or is impractical
Autonomous drone landing pad
It is possible to build an autonomous landing platform for a drone. It can even be a moving one:
- You place four stationary Super-Beacons facing up on the edges of the platform. The larger platform, the better accuracy of the distance
- You put two mobile Super-Beacons facing down
Drone flies using regular RTK GPS or even GPS when it is far and up to 30m from the platform. It is locked to the Indoor “GPS” coordinates and is landing based on these coordinates. As mentioned, the platform may be static against the Earth or moving. It doesn’t matter for the drone. So, you can precisely land on a moving vehicle, for example.

Requirements towards indoor drone positioning system
Refer to the Products page for various starter set options.
Remember that just three stationary beacons would have little resiliency against obstructions for 3D (XYZ) tracking. Any occlusion of any stationary beacon, a non-line of sight/hearing situation, will lead to no tracking or erroneous tracking, like in GPS: “no satellite visibility = no GPS coordinates = no tracking”.
Thus, we recommend at least N+1 redundancy for stationary beacons. And that is why our starter sets for 3D consist of 4 stationary beacons.
Even better is to have 2N redundancy with fully overlapping 3D submaps. That would be either 3+3 or 4+4 stationary beacons. The system would automatically choose the best submap for tracking. That kind of system is very resilient, and with proper placement of the beacons, you can fly even in complex rooms with columns, for example, without tracking issues.
The key to excellent tracking is to provide proper coverage at any flight point. This means that the mobile beacons on the drone must have three or more stationary beacons belonging to the same submap, with a clear, direct line of sight/hearing within 30m.
The proper placement is usually key and vital for drones. What to pay attention to?
Alternative technologies: UWB, optical, and motion capture systems
UWB-based systems
UWB-based indoor drone positioning systems don’t differ much in principle from the Marvelmind Indoor “GPS”. Of course, the underlying technology is different (time of flight of UWB compared to the time of flight of ultrasound). But the architecture and the network elements are very similar.
Practical differences between UWB and Marvelmind Indoor “GPS”:
- UWB is about ten times less accurate than ultrasound, i.e., the drones are more stable in the air
- However, UWB is not affected by the acoustic noise of the drones in principle
- UWB can support more drones at the same time in principle. Whether or not the UWB supports more drones in reality and the resulting update rate per drone depends on the UWB system implementation. IA-based systems can easily rival UWB-based systems in terms of capacity and surpass them in terms of accuracy by a factor of ten
Optical systems: QR codes around
Becomes more and more popular due to potential simplicity:
- A camera is facing down to QR codes (or other special patterns) on the floor. QR codes provide both location and direction
- QR codes can be above the drones (ceilings), if more convenient
- QR codes may be around the drone, but then more cameras or special “fish-eye” cameras are required
Pros: relatively inexpensive positioning system; no need in active beacons around.
Cons: a need for QR codes around, sometimes they are either undesired or even impossible; requirements to special lighting; triangulation based system, thus, QR codes must be dense and pretty near or accuracy of position suffers.
Consider an alternative: Autonomous drone landing pad.
Motion capture-based systems
Very impressive drone shows lead us to believe that drones are so intelligent. However, the view is very deceiving. The positioning system is a pearl of the setup, not the drones. Drones are rather dumb. They are not even aware that they are tracked. Besides, they are entirely remotely controlled based on the location data from the tracking system. Thus, they are even dumber. But it is okay. It doesn’t matter how the feat is achieved as soon as the performance is impressive and truly impressive.
- They are expensive or very expensive because they require fast high-resolution infrared cameras, a lot of data connection (cabling) between the cameras and the central computer, expensive power computer, and special infrared lighting
- They are naturally limited in the covered area because the location is based on triangulation, and they are typically limited to 10x10m or so
- On the good side, the trackers on the drones are light and passive, just light reflectors
Examples of implementation of precise indoor positioning, tracking, and navigation for drones on Marvelmind Indoor "GPS"
Precisely (±2cm) tracking DJI Phantom quadcopter indoor in 3D (XYZ)
- Precise tracking in X,Y,Z (XY view + XZ view + YZ view)
- Raw data and post-processed data from Dashboard’s Player, notice that today the same is available not in the post-processing but in the Real-Time Player
- The DJI ecosystem is closed, at least, for the Phantom and Mavic series. Thus, it is possible to track the Phantom but not fly autonomously indoors (without deeper hacking)
- Learn more about Flying DJI drones autonomously indoor

Precisely (±2cm) tracking DJI Phantom quadcopter outdoor in 3D (XYZ)
- Precise (±2cm) tracking in XYZ (XY view + XZ view + YZ view), the same as above, but outdoor
- The same Precise-Z configuration consisting of 4+2 stationary beacons is used in this demo and above. See more in the Placement Manual
- Learn more about Flying DJI drones autonomously indoor

Fully autonomous flight indoor
Small copter is flying fully autonomously relying on Marvelmind Indoor “GPS”

Using IA for indoor drone tracking and indoor drone swarms
With a combination of solutions, it is possible to use IA for indoor drone positioning:
- Special ultrasound deflector protecting the microphone from the own propellers’ noise
- Placing stationary beacons clearly above the drone
- Using special sharp and narrow DSP filters
Indoor tracking small and micro-drones
It is possible to track even micro-drones (less than 100g) with the help of Mini-TX beacons.
Starter Set NIA-SmallDrone is specifically designed for this kind of drones.
The minimum configuration for the drone tracking would be any NIA set with 3D capability. For example, three stationary beacons + 1 mobile beacon + 1 modem and Non-Inverse Architecture (NIA) or Multi-Frequency NIA (MF NIA) would already be OK for the drone.

Drones for warehouse inspection
Using drones for warehouse inspection is pretty popular: finding lost pallets, security, etc. Yes, it is a doable task but very complex in practice:
- Very challenging environment in general
- Drones fall and break, high cost of error
- Drones are potentially dangerous to fly and challenging to develop and use
Nevertheless, the solution is up-and-coming. Thus, drone builders or builders of warehouse systems use our indoor positioning system for such solutions. In the video, we explain the peculiarities of the environment (narrow aisles and high shelves), how the peculiarities affect accuracy, and how to build the system optimally.

