















Boxie 2 is an autonomous mobile robot for smart warehousing, industrial applications, research, and education. It is a flexible robot with open interfaces, ready for connectivity with external devices (scanners, readers, arms, baskets), and capable to carry up to 10 kg with running time from 10 to 48 hours.
Typical use cases:
- Performing automatic periodic scans by carrying user’s scanning equipment (bar/QR code scanners, RFID readers, optical cameras, and other measurement devices)
- Autonomous delivery of goods or baskets with goods/tools/inventory in warehouses, assembly plants (expensive gauges and similar), chemical plants (samples, etc.) – up to 10 kg payload
Demo and help videos:
- Unpacking: Marvelmind Boxie 2 Robot
- Four Boxie 2 robots on a factory floor
- Four Boxie 2 robots are doing pre-defined waypoint movements
- Marvelmind Boxie – teaser (15 sec)
- Boxie’s inner beauty
- Two Boxie robots are driving indoors
- Boxie – fully autonomous mobile robot – driving outdoors
- Marvelmind Boxie – detailed review
Support materials:
SW:
- Marvelmind Boxie 2 SW pack (ZIP)
- Marvelmind Boxie SD card (RAR)
- Marvelmind Boxie API (ZIP)
Marvelmind Boxie API
The API allows a very advanced and very deep control of the robot. You can get data to your onboard or remote computer (for example, odometry readings or IMU data, motors current consumption, the detailed status of virtually any sensor, etc.). You can control the robot to the deepest level (for example, deep settings of the indoor positioning system or front LEDs for illumination or control the external power switches, etc.).
Download the Boxie API.
- Download the Marvelmind Boxie SW pack
- Copy the SW to a USB memory stick
- Plug the USB stick into a rear USB port of Boxie
- Press the Reset button on Boxie
- The SW will be automatically in 1-2 minutes. The robot will give the voice announcements
- The robot will do the final self-reset and become updated and ready
- For more details, follow the instructions in the Boxie Operating Manual
- Odo board software
- Software for internal mobile beacons (“hedges”). Notice that there are separate software files for the left and right hedge. Left – from the robot’s point of view, if the robot drives forward
- LIDAR board
- Download the Marvelmind Boxie SD card – use only when the Micro SD card update is required
- This kind of update maybe required only for some particular major SW updates. Typically, a basic update via the USB memory stick is sufficient and recommended
- After that, the Boxie SW is updated via USB stick and is fully automatic and takes a few minutes minutes – see more about Marvelmind Boxie SW pack update above
- Follow the steps in the Boxie Operating Manual
Configurations and costs
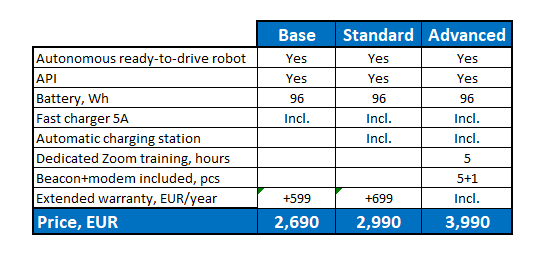
Key specs and features:
- Fully autonomous delivery from point A to point B (C, D, E, etc.) indoors with a single button click or via a remote one-click command from the Marvelmind Dashboard or your GUI via our open API
- Up to 10 kg payload with multiple optional mounted equipment starting from basic baskets to arms with grippers
- Automatic LIDAR-based obstacle detection and avoidance for safety (12 x 1D LIDARs)
- Complete remote control & monitoring by a dispatcher or user via Marvelmind Dashboard or your GUI via our open API
- Long battery lifetime: up to 16-hour drive with default internal battery (96 Wh). Up to 48-hour drive with the full battery bay (480 Wh). Drive time is an estimation based on the current consumption and the batteries capacities. Optional external batteries of up to 10kg
- Fast charging: ≤2h with the default fast charger – 5 A charging current
- Own weight: ~5kg net
- Additional internal power converters to power user’s equipment (displays, arms, cameras, etc.)
- Customized reporting and analytics (optional)
- White labeling variant (optional)
- Further customization (optional)
No additional assembly is required. Ready to drive out of the box.
Technical Details
Advanced sensor fusion for localization, navigation and autonomous driving:
- Marvelmind Indoor Positioning System in the Paired Beacons configuration for Location & Direction + Odometer + IMU
Obstacle Detection and Avoidance:
- 12 x 1D LIDARs
- 2 x Sonars + 2 x Omni-Microphones
- Motors current sensing and odometry
Sensors:
- Marvelmind Indoor “GPS”
- 12 x 1D LIDARs
- Up-facing camera for “stargazing”-based
- 6D IMU
- Odometer for each wheel
- 2 x sonars
- Voltage sensing
- Current sensing
Processors:
- Raspberry Pi Zero 2 W with Raspbean OS and and MicroSD for easy update
- Several Marvelmind processors (Odo, Hedge Master, Hedge Slave, LIDARs) for robustness
APIs:
- API is available on the low level (Odometer board, etc.) and the high-level – Raspberry, ROS
- The majority of internal functions and sensory information is either already available via the API or can be made available through the APIs on request
Chassis and kinematics:
- Very rigid – 1mm steel
- Up to 10kg payload
- Two-wheel drive with front and back castor wheels. Capable of turning around on one point
- There are multiple mounting holes for most common boards:
- Several flavors of Raspberry Pi
- Jetson Nano
- Arduino
- 30×30 pattern 3mm holes
Battery and chargers:
- Internal 12.6 V LiPol battery with default 8 Ah capacity = 96 Wh
- Maximum internal battery capacity – up to 40 Ah (480 Wh)
- Fast 5A charger
- Automatic charging station (in Standard and Advanced configurations)
- Optional external batteries
- Current and voltage sensing (also available via API)
External Interfaces:
- 6-port USB hub
- 40 pins of Pi Zero 2 W
- 40 pins from our Odo board:
- UART
- SPI
- I2C
- +12V & 2A and +5V & 2A to power your external devices
- GND switch up 2 A to control your devices
- HDMI + USB hub for external monitor + keyboard + mouse for easy debugging
- Stereo sound
- Buzzer
- LED (top and 2 x front) for interfacing, debugging, and lighting
- 2 x programmable Functional Buttons (FN1 and FN2) and a Reset button
Wireless Connectivity:
- Marvelmind radio in the license-free band (868 or 915MHz) – very useful for up to a few tens of kbps data transmission to and from the robot including user’s payload, for example, recognized QR code readings
- WiFi
- Bluetooth
Optical Sensors:
- Up-facing camera connected for autonomous driving based on “stargazing”
