Home » Indoor positioning system for small drones
Summary
Indoor positioning system for small drones for which the low weight of the mobile beacon (tag) is crucial.
- Task
- Total Area
- Quantity of drones
- Autonomous
- Indoor only
- Drone weight
- Tag weight
- Skill requirements
- Costs
- Autonomous flight
- Several rooms
- One drone
- YES
- YES
- <100 g
- 6.4 g
- High
- ~500-1000 EUR
Examples



Task
I am building an autonomous drone for indoor navigation. My biggest constraint is size and weight.
Size: palm size.
Weight: under 100g, including batteries.
required endurance: 1-2min
Mission: fly autonomously from one point inside the building to a goal position, given a 3D-Map of the building. Say from 1 room to another of a house, and land there.
Due to weight constraints, I will not be using a companion computer. Rather, I will be using a ground station where my python script will be running, and it will be communicating with the drone.
QUESTION: What is the best way to navigate my drone indoors?
Problem
There is a fundamental difference between small autonomous indoor drones and large autonomous indoor drones.
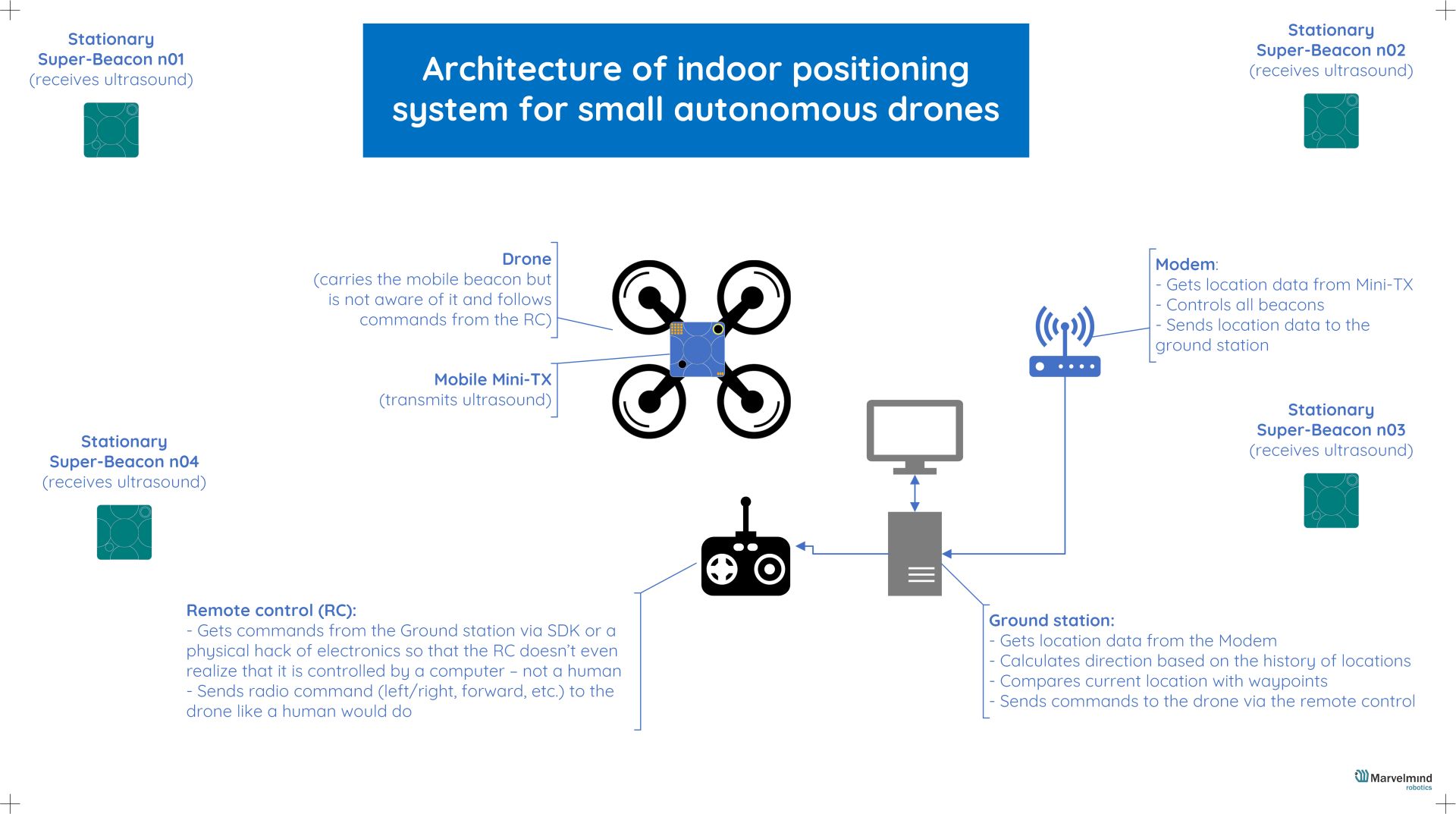
The smaller drones are typically too small to carry autopilot hardware. Their lift-off capacity is enough to have a mobile beacon (tag). Thus, they are remotely controlled by a system. They are still fully autonomous drones, but their intelligence is remote – in the system – not onboard. They are rather dumb by themselves and blindly follow the commands from the system. They are often unaware they have a mobile beacon and other sensors.
The larger drones can easily carry the autopilot hardware and other sensors, for example, for obstacle detection and avoidance, because they are not so heavy, particularly for mid-size or larger drones. The larger drones are truly fully autonomous because they receive a task or waypoints from the system, but all decision-making is done onboard – not remotely.
The size borderline between smaller and larger drones is somewhat blurry but is at the level of 200-500 grams of the total lift-off weight of the drone.
Solution
The indoor positioning system for a small drone is not different from other indoor positioning systems, for example, for larger drones or any other 3D (XYZ) indoor positioning systems.
The only peculiarity is the weight of the mobile beacon (tag) installed on the drone, which is solved by using a stripped-down version of Mini-TX: removing the shell, removing the battery, or replacing it with a very light battery.
Also, the drone is dumb – it doesn’t have an onboard computer or autopilot, for example, PixHawk and similar. All intelligence comes from the ground station.
Recommended configuration
The Marvelmind Indoor Positioning System will provide only accurate indoor positioning for the drone. All decision-making, path planning, and drone control must come from the ground station software. It is a pretty complex task that requires a high level of software skills.
We recommend keeping the basic drone controller already available on the drone and not inventing the wheel. The drone’s controller will keep the drone stable in the air. But the controller is not location and direction aware. The location will come from us. Direction must come from the ground station controller. The waypoints and the task must come from the ground station as well.
Notes
Direction
- For autonomous flight, the autopilot must know not only location of the drone but also where the drone is facing. When outside, the magnetometer (compass) typically solves the task. However, it doesn't work indoor
- Our recommended solution - the Paired Beacons configuration - also doesn't suit small drones because of size and weight constrains
- The autopilot must be smarter for small drones and constantly calculate the direction based on the measured locations over the distance and the data from the Mini-TX's IMU. It is possible to do, but more complex than the solution with the Paired Beacons. And it can't know the direction in static unless the user always places the drone in a specified position with a fixed direction
Map building
Power supply to Mini-TX
- Connect directly with the drone's battery if it is 3.6V LiPol, which is typical for small drones.
- Connect via a light DC-3.6V or DC-5.0V converter if the drone's battery differs from 1-cell LiPol (3.6V).
- Generally speaking, having a DC-DC converter helps if the battery's voltage drops due to the motor's current or noise.
Power supply to stationary Super-Beacons
Why NIA and not IA or MF NIA?
- It is not IA. because in IA, the mobile beacon is receiving ultrasound. However, noisy propellers would limit the range of tracking to just a few meters
- It is not MF NIA, because currently Mini-TX supports only one ultrasound frequency - 31kHz. However, ifor orders >100 x Mini-TX per frequency we will offer Mini-TX on different ultrasound frequencies from 31kHz and up and MF NIA will be available. It is particularly useful for drone shows and drones swarms, because the location update rate per drone will increase proportionally to the number of ultrasound frequencies used