Sistema de Posicionamiento Interior Preciso para Drones Autónomos
Explicamos cómo diseñar y construir drones autónomos para interiores y qué sistemas de posicionamiento interior utilizar para rastrear drones en interiores cuando no son autónomos.
Aunque nos enfocamos en drones de interior y navegación autónoma de drones en interiores, el sistema de posicionamiento para drones funciona perfectamente también en exteriores.
Para drones basados en Pixhawk/ArduPilot/PX4, utilice el siguiente enlace.


Para drones DJI en interiores, existe una página dedicada: ¿Cómo volar un dron DJI de forma autónoma en interiores?
Lea aquí para saber cómo elegir entre DJI y Pixhawk.
Otros recursos de ayuda de Marvelmind relacionados con drones
- Caso de éxito de cliente: Vuelo autónomo de dron de interior basado en PixHawk + ArduPilot
- Alimentación de balizas con fuente de alimentación externa
- Sistema de posicionamiento interior para competición de drones
- ¿Cuántas balizas estacionarias necesitamos para cubrir nuestro espacio de oficina para un dron de patrulla autónomo en interiores?
- Uso de IA para drones
- Seguimiento de DJI en interiores: edición de dos habitaciones
- Seguimiento XYZ preciso para enjambres de drones en interiores y espectáculos de drones en interiores
- Plataforma de aterrizaje autónoma para drones
- Degradación de la precisión en sistemas de posicionamiento interior preciso y cómo evitarla
- Ayuda: PixHawk + PX4 + Balizas emparejadas para ubicación + dirección en lugar de magnetómetros
- Ayuda: Drones autónomos para inspección en almacén
- Seguimiento de micro-dron en interiores a larga distancia
- Seguimiento de micro-dron con Reproductor en Tiempo Real activado
- Seguimiento de micro-dron con Reproductor en Tiempo Real desactivado
- Seguimiento interior preciso (±2 cm) en XYZ sin GPS/GLONASS
- Seguimiento preciso (±2 cm) de dron en exteriores sin GPS/GLONASS – vuelo horizontal en dos echelones
- Vuelo totalmente autónomo en interiores
- Ayuda: colocación de baliza móvil en el cóptero
- Ayuda: coordenadas Z para cópteros – explicación extensa
- Cóptero rastreado en exteriores con precisión de pocos centímetros
RTLS interior recomendado para drones - consejos rápidos
Si es nuevo en el sistema Marvelmind Indoor “GPS” y no está seguro de qué elegir, adquiera el Starter Set Super-MP, donde MP significa multipropósito, y esa sería su opción más segura.
Para más detalles, consulte las opciones recomendadas a continuación.
En general, la mejor y más segura opción cuando no está seguro de qué elegir o qué experimentos realizará exactamente, pero desea tener simultáneamente la mayor flexibilidad y rendimiento.
Es la mejor opción cuando necesita conectarse a PixHawk, ya que los dos pines para la conexión a PixHawk están disponibles directamente en el Super-Beacon. Ver más.
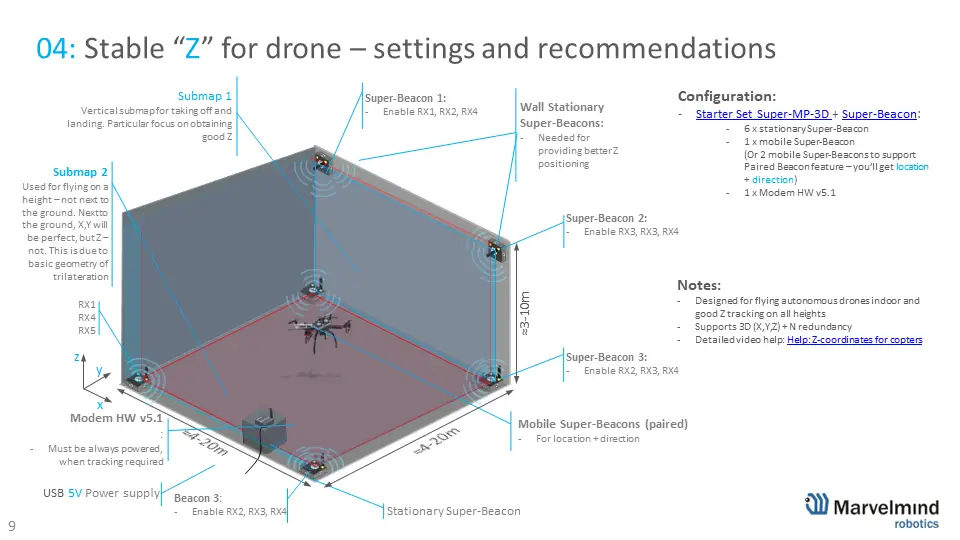
Configuración:
– https://marvelmind.com/product/starter-set-super-mp-3d/
– https://marvelmind.com/product/super-beacon/ – una baliza móvil adicional para la configuración de Balizas Emparejadas para tener tanto ubicación como dirección. Más información sobre la demo de Balizas Emparejadas
El conjunto está diseñado para micro-drones (<100g) porque la baliza móvil Mini-TX es pequeña y liviana. Mini-TX puede cubrir hasta 15-20m de alcance hasta las balizas estacionarias, suficiente para la mayoría de los casos reales. El conjunto también puede utilizarse para drones más grandes, pero el alcance de ultrasonido de Mini-TX es menor que el de los Super-Beacons. Por lo tanto, si el peso no es crítico, la mejor opción es utilizar Super-Beacons como balizas móviles. Solo si el peso es realmente la única preocupación, Mini-TX es insuperable.
Mini-TX es excelente para el seguimiento. La nueva versión Mini-TX-2 también es ideal para conectarse a PixHawk porque tiene un conector especial de 6 pines con dos pines dedicados a la conectividad con PixHawk (TX + GND), similar a los del Super-Beacon. Tenga en cuenta que los Mini-TX más antiguos, entregados en 2022 y anteriores, no tenían el conector de 6 pines en la parte inferior.
Configuración:
– https://marvelmind.com/product/starter-set-nia-03-smalldrone
Una versión avanzada de la opción “Starter Set Super-MP-3D + Super-Beacon – Ubicación+Dirección en el dron”.
El Precise-Z, que físicamente consiste en 2 balizas estacionarias adicionales, ofrece la posibilidad de tener coordenadas Z precisas en todos los rangos de Z.
Más información:
– Manual de Colocación – diapositiva de Precise-Z
– Explicación en vídeo sobre Z y colocación de balizas
Configuración:
– https://marvelmind.com/product/starter-set-super-mp-3d/
– https://marvelmind.com/product/super-beacon/ – una baliza móvil adicional para la configuración de Balizas Emparejadas para tener tanto ubicación como dirección. Más información sobre la demo de Balizas Emparejadas
– https://marvelmind.com/product/super-beacon/ – balizas estacionarias adicionales para la función Precise-Z

Uso del Marvelmind Indoor "GPS" para drones y cuadricópteros
El sistema de posicionamiento interior Marvelmind o Marvelmind Indoor “GPS” se utiliza ampliamente para drones o cuadricópteros de muchas formas diferentes:
- Guía de drones autónomos en interiores y exteriores. Drones en exteriores: guía para “la última milla”, que puede ser de cientos de metros si es necesario, pero la distancia máxima desde la baliza móvil del dron hasta tres o más balizas estacionarias que dan servicio a la baliza móvil no debe superar
- Seguimiento de drones en interiores
- Aterrizaje autónomo de drones en interiores y exteriores o asistencia de aterrizaje de drones
- Inspección de almacenes mediante drones autónomos en interiores
- Espectáculos de drones


El peso y el tamaño son las mayores restricciones para los drones pequeños
El sistema de posicionamiento interior para un dron pequeño no es significativamente diferente de otros sistemas de posicionamiento interior, como los utilizados para drones más grandes u otros sistemas de posicionamiento interior 3D (XYZ).
La única particularidad es el peso de la baliza móvil (etiqueta) instalada en el dron. Esto se resuelve utilizando una versión reducida de Mini-TX, que consiste en retirar la carcasa, quitar la batería o sustituirla por una batería muy ligera.
Además, los drones más pequeños suelen ser básicos: carecen de ordenador de a bordo o piloto automático, como Pixhawk y modelos similares, por ejemplo. Toda la inteligencia proviene de la estación en tierra. Sin embargo, existen excepciones.

{kind=link}
Los enjambres de drones y los espectáculos de drones pueden incluir decenas o incluso cientos de drones. Cuando vuelan en exteriores, el GPS RTK funciona muy bien. Pero el GPS RTK no funciona en interiores.
Un sistema de posicionamiento interior típico para drones se basaría en NIA: una baliza móvil en NIA emite ultrasonido. Sin embargo, en este caso, el número práctico de drones compatibles sería de 1 a 8, ya que con NIA, la tasa de actualización de ubicación por dron disminuye proporcionalmente al número de drones.
Se debe utilizar IA si el enjambre de drones en interiores está compuesto por decenas de drones. Sin embargo, en IA, la baliza móvil escucha el ultrasonido; por lo tanto, se deben utilizar soluciones especiales para combatir el ruido de las hélices y garantizar el correcto funcionamiento del sistema. Más información sobre la solución.
Semanalmente recibimos solicitudes de drones autónomos o sistemas de posicionamiento interior para drones autónomos en interiores, principalmente para inspección de almacenes, escaneo automatizado de códigos de barras o lectura RFID.
Sin duda existe una necesidad sólida para esta tarea y un gran interés en llevarla a cabo mediante drones.
Construir un sistema de este tipo para aplicaciones en la vida real es una tarea compleja pero factible. Analicemos los detalles de la implementación.

La fragilidad de la solución es la preocupación práctica más significativa. Sin embargo, existen soluciones e incluso alternativas robustas.
Marvelmind Indoor "GPS" es compatible con PixHawk con ArduPilot y PX4
Marvelmind Indoor “GPS” es compatible con PixHawk con ArduPilot y PX4:
- Marvelmind y ArduPilot – enlace a ArduPilot.org
- Manual de integración de Marvelmind y PX4 – guía paso a paso con ajustes y capturas de pantalla para Mission Planner, PixHawk y la conectividad de hardware
- Manual de integración de PixHawk y Marvelmind – guía paso a paso para la integración de PixHawk, ArduPilot y Marvelmind para drones
Marvelmind y PixHawk
Utilizar una combinación de Marvelmind Indoor “GPS” y PixHawk es la forma más fácil y rápida de volar en interiores de forma autónoma.

Construya correctamente el sistema de posicionamiento interior para cuadricópteros
Hay varios aspectos, aunque bastante simples, que deben tenerse en cuenta para volar en interiores con éxito:
- Manual de configuración de cópteros autónomos – recomendaciones básicas y prácticas para configurar el sistema Indoor “GPS” para su uso con cópteros/drones autónomos en interiores y exteriores
- Manual de Colocación – consejos prácticos y ejemplos de cómo instalar el sistema Marvelmind Indoor “GPS” para lograr el mejor rendimiento en diferentes aplicaciones y configuraciones
- Ayuda: coordenadas Z para cópteros – Explicación extensa – vídeo de YouTube que explica cómo colocar correctamente las balizas estacionarias para lograr una buena precisión en Z. Si no puede seguir el consejo porque su entorno no le permite utilizar la configuración Precise Z con 4+2 balizas estacionarias, recuerde que esta configuración solo se recomienda para usuarios avanzados y únicamente cuando la configuración básica, robusta y aún más precisa con cuatro balizas estacionarias sobre el área de vuelo no puede utilizarse o resulta poco práctica
Consulte la página de Productos para conocer las distintas opciones de conjuntos de inicio.
Recuerde que solo tres balizas estacionarias ofrecerían poca resistencia ante obstrucciones para el seguimiento 3D (XYZ). Cualquier oclusión de cualquier baliza estacionaria —una situación sin línea de visión directa— dará lugar a la ausencia de seguimiento o a un seguimiento erróneo, como ocurre con el GPS: “sin visibilidad de satélite = sin coordenadas GPS = sin seguimiento”.
Por ello, recomendamos al menos una redundancia N+1 para las balizas estacionarias. Por eso nuestros conjuntos de inicio para 3D incluyen 4 balizas estacionarias.
Aún mejor es tener una redundancia 2N con submapas 3D completamente superpuestos. Esto sería con 3+3 o 4+4 balizas estacionarias. El sistema elegiría automáticamente el mejor submapa para el seguimiento. Este tipo de sistema es muy resistente y, con una correcta colocación de las balizas, puede volar incluso en salas complejas con columnas, por ejemplo, sin problemas de seguimiento.
La clave para un excelente seguimiento es garantizar una cobertura adecuada en cualquier punto de vuelo. Esto significa que las balizas móviles del dron deben tener tres o más balizas estacionarias pertenecientes al mismo submapa, con una línea de visión directa clara dentro de los 30m.
La colocación correcta es generalmente clave y fundamental para los drones, ya que requieren capacidades 3D; los drones son rápidos y los errores pueden ser especialmente costosos. ¿A qué hay que prestar atención?
- El requisito más crítico para un buen seguimiento o vuelo autónomo es garantizar una línea de visión directa clara desde las balizas móviles del dron hasta 3 o más balizas estacionarias
- No confíe en los magnetómetros en interiores. Use la configuración de Balizas Emparejadas para Ubicación+Dirección
- Coloque las balizas estacionarias de forma que los ángulos desde la baliza móvil hasta las balizas estacionarias sean de 30 grados o más. Consulte una explicación más detallada en el vídeo
- Utilice las configuraciones Precise-Z cuando no sea posible lograr ángulos adecuados hacia las balizas estacionarias de otra manera
El seguimiento de un dron en interiores en un gran espacio abierto es muy sencillo. Con un Starter Set Super-MP o un Starter Set NIA-SmallDrone, el sistema de seguimiento 3D preciso puede configurarse en 10-15 minutos, incluido el desempaquetado y las actualizaciones de software, con un conjunto recién recibido. Si ha completado todas las actualizaciones iniciales de software antes de la instalación, el sistema puede desplegarse en menos de un minuto.
El vuelo autónomo es una tarea significativamente más compleja, ya que es necesario rastrear con precisión un dron e integrar su piloto automático con el dron/chasis, que normalmente está compuesto por diferentes partes (chasis, motores, controladores de motores, telemetría, control remoto). Y además, el piloto automático debe integrarse con el sistema de posicionamiento interior como se describe anteriormente.
Si el vuelo autónomo de un solo dron ya es una tarea desafiante, el vuelo autónomo de un enjambre de drones es la cima de esta pirámide de complejidad. Es aún más desafiante, pero sigue siendo factible si se avanza paso a paso.
Antes de sumergirnos en profundidad en los enjambres de drones en interiores, respondamos la pregunta básica: “¿Cómo vuelan esos miles de drones en el cielo?” – pues es sencillo: utilizan el sistema de posicionamiento RTK GPS. Sin embargo, recuerde que el RTK GPS depende del GPS. Si no hay GPS, tampoco hay RTK GPS. Por lo tanto, en cuanto nos trasladamos a interiores u otras zonas sin cobertura GNSS, olvídese del GPS (GLONASS, Beidou, Galileo, etc.)
Los drones pequeños son demasiado pequeños. Los drones grandes son demasiado grandes
Tener un gran enjambre de drones pequeños y ofrecer un bonito espectáculo sería estupendo. Sin embargo:
- Tamaño de la batería vs. duración del espectáculo vs. tamaño del dron
- El piloto automático y el sistema de posicionamiento interior tienen una masa no nula. Existe una limitación en el tamaño mínimo de los drones
- Los drones necesitan dirección. La dirección se logra mejor con dos o más puntos de ubicación en los drones. Cuanto más separados estén, mejor será la precisión angular
Si los drones son demasiado grandes:
- Es difícil mantenerlos separados. Se necesita una mayor distancia de seguridad entre ellos y, como resultado, un espacio mayor para el espectáculo
- Los drones más grandes son más pesados, más ruidosos y más peligrosos. El ruido y las redes de protección pueden arruinar toda la idea del espectáculo
Haga creer a los drones que están solos
En muchos casos, es posible configurar el vuelo autónomo de múltiples drones de forma que ni siquiera sean conscientes de que hay otros drones a su alrededor. Creen que son únicos y excepcionales. Es de su interés mantenerlos en esta ingenua creencia, ya que es la forma más sencilla de crear enjambres de drones.
Ejemplos de configuraciones de sistemas de posicionamiento interior para espectáculos de drones basados en Marvelmind Indoor "GPS"
Mediante una combinación de soluciones, es posible volar un enjambre de drones usando IA: Sistema de posicionamiento interior para espectáculos y enjambres de drones.
Esta solución compleja puede no ser adecuada si es nuevo en nuestro sistema o en los drones en general. Pero ofrece el mejor rendimiento para espectáculos de drones en interiores, ya que permite volar múltiples drones autónomos sin reducción en la tasa de actualización de ubicación y ofrece la mayor precisión de posicionamiento de ±2cm.
Configuración:
- IA
- 4 x https://marvelmind.com/product/super-beacon/ – balizas estacionarias colocadas alrededor y sobre el área de vuelo
- 1 x Modem v5.1
- 10 x Mini-RX + Micrófono – una baliza móvil híbrida para cada dron
Como se ha comentado anteriormente, lo primero que hay que decidir es si necesitas la dirección basada en los Paired Beacons. Si la necesitas, entonces necesitas dos balizas móviles por dron. Si no la necesitas, solo una baliza móvil por dron.
Es posible volar con una sola baliza móvil, pero el SW en el piloto automático debe ser más complejo: no es una solución lista para usar, ya que debe proporcionar la dirección y la corrección de la deriva del giroscopio del dron mientras vuela. Es complejo. Factible. Pero complejo. Y si es posible, siempre recomendamos la configuración de Paired Beacons como una solución sencilla para la dirección en interiores, incluso en estático.
Sin embargo, como se ha comentado anteriormente, para drones en enjambre o espectáculos de drones en interiores, puede que no sea la mejor opción. Por lo tanto, asumiremos una opción más compleja y frágil basada en una sola baliza móvil como variante principal del dron.
Configuración:
- MF NIA – MF NIA se recomienda encarecidamente para enjambres de drones porque NIA sería demasiado lento, y los drones pueden generar demasiado ruido para IA
- 4 x https://marvelmind.com/product/super-beacon/ – balizas estacionarias colocadas alrededor y por encima del área de vuelo
- 1 x Modem v5.1
- 10 x Super-Beacons – balizas móviles para diez drones
- 14 x licencias MF NIA
Si tus drones son pequeños y no pueden cargar un peso de 27g (una versión reducida del Super-Beacon), entonces el Mini-TX sin batería ni carcasa adicional es tu mejor opción. En la configuración reducida, pesa solo 6,7g.
Sin embargo, el Mini-TX funciona únicamente en una frecuencia (31kHz). Por lo tanto, NIA sigue siendo tu única opción. En consecuencia, si tienes diez drones, la tasa de actualización de ubicación por dron será 1/10 de la tasa de actualización de ubicación del sistema. Para un submapa pequeño de 5x5m, es posible obtener 20-25Hz por sistema. Así, por dron, la tasa de actualización de ubicación será de ~2-2,5Hz. Esta tasa de actualización de ubicación es adecuada para espectáculos de movimiento lento. Aun así, es mucho mejor que nada.
Configuración:
- NIA
- 4 x https://marvelmind.com/product/super-beacon/ – balizas estacionarias colocadas alrededor y por encima del área de vuelo
- 1 x Modem v5.1 – controlador central del sistema. Puedes monitorizar los datos y controlar los drones a través de él
- 10 x Mini-TX – balizas móviles para diez drones
Sistemas basados en UWB
Los sistemas de posicionamiento interior de drones basados en UWB no difieren mucho en principio del Marvelmind Indoor “GPS”. Por supuesto, la tecnología subyacente es diferente (tiempo de vuelo de UWB en comparación con el tiempo de vuelo del ultrasonido). Pero la arquitectura y los elementos de red son muy similares.
Diferencias prácticas entre UWB y Marvelmind Indoor “GPS”:
- UWB es aproximadamente diez veces menos preciso que el ultrasonido, es decir, los drones son más estables en el aire
- Sin embargo, UWB no se ve afectado en principio por el ruido acústico de los drones
- UWB puede admitir más drones al mismo tiempo en principio. Si UWB admite más drones en la realidad y la tasa de actualización resultante por dron depende de la implementación del sistema UWB. Los sistemas basados en IA pueden rivalizar fácilmente con los sistemas basados en UWB en términos de capacidad y superarlos en términos de precisión por un factor de diez
Sistemas ópticos - códigos QR alrededor
Se vuelve cada vez más popular debido a su posible simplicidad:
- Una cámara apunta hacia abajo a códigos QR (u otros patrones especiales) en el suelo. Los códigos QR proporcionan tanto la ubicación como la dirección
- Los códigos QR pueden estar por encima de los drones (techos), si resulta más conveniente
- Los códigos QR pueden estar alrededor del dron, pero en ese caso se requieren más cámaras o cámaras especiales de “ojo de pez”
Ventajas:
- Sistema de posicionamiento relativamente económico
- No se necesitan balizas activas alrededor
Desventajas:
- Necesidad de códigos QR alrededor – a veces no son deseados o incluso imposibles de colocar
- Requisitos de iluminación especial
- Sistema basado en triangulación, por lo que los códigos QR deben ser densos y estar bastante cerca, o la precisión de la posición se ve afectada
Considera una alternativa: Plataforma de aterrizaje autónoma para drones.
Sistemas basados en captura de movimiento
Los espectáculos de drones tan impresionantes nos hacen creer que los drones son muy inteligentes. Sin embargo, la apariencia es muy engañosa. El sistema de posicionamiento es la joya de la configuración, no los drones. Los drones son bastante simples. Ni siquiera son conscientes de que están siendo rastreados. Además, están completamente controlados de forma remota basándose en los datos de ubicación del sistema de seguimiento. Por lo tanto, son aún más simples. Pero está bien. No importa cómo se logra el logro mientras la actuación sea impresionante y verdaderamente impresionante.
Sistemas basados en captura de movimiento:
- Son costosos o muy costosos porque requieren cámaras infrarrojas de alta resolución y alta velocidad, mucha conectividad de datos (cableado) entre las cámaras y el ordenador central, un ordenador de alto rendimiento e iluminación infrarroja especial
- Están naturalmente limitados en el área cubierta porque la ubicación se basa en triangulación, y generalmente están limitados a 10x10m aproximadamente
- En el lado positivo, los rastreadores en los drones son ligeros y pasivos: solo son reflectores de luz
Ejemplos de implementación de posicionamiento interior preciso, seguimiento y navegación para drones con Marvelmind Indoor "GPS"
Seguimiento preciso (±2cm) del cuadricóptero DJI Phantom en interiores en 3D (XYZ)
- Seguimiento preciso en X,Y,Z (vista XY + vista XZ + vista YZ)
- Datos brutos y datos postprocesados del Reproductor de Dashboard – nótese que hoy en día lo mismo está disponible no en el postprocesamiento sino en el Reproductor en Tiempo Real
- El ecosistema DJI es cerrado, al menos para las series Phantom y Mavic. Por lo tanto, es posible rastrear el Phantom pero no volar de forma autónoma en interiores (sin una modificación más profunda)
- Aprende más sobre volar drones DJI de forma autónoma en interiores
Seguimiento preciso (±2cm) del cuadricóptero DJI Phantom en exteriores en 3D (XYZ)
- Seguimiento preciso (±2cm) en XYZ (vista XY + vista XZ + vista YZ) – igual que el anterior, pero en exteriores
- La misma configuración Precise-Z compuesta por 4+2 balizas estacionarias se utiliza en esta demostración y en la anterior. Ver más en el Manual de Colocación
- Aprende más sobre volar drones DJI de forma autónoma en interiores
Vuelo totalmente autónomo en interiores
- Un pequeño cóptero vuela de forma totalmente autónoma apoyándose en Marvelmind Indoor “GPS”
Uso de IA para el seguimiento de drones en interiores y enjambres de drones en interiores
Con una combinación de soluciones, es posible usar IA para el posicionamiento de drones en interiores:
- Un deflector de ultrasonido especial que protege el micrófono del ruido de las propias hélices
- Colocar balizas estacionarias claramente por encima del dron
- Usar filtros DSP especiales, agudos y estrechos
Seguimiento en interiores de drones pequeños y microdrones
Es posible rastrear incluso microdrones (menos de 100g) con la ayuda de balizas Mini-TX.
Starter Set NIA-SmallDrone está diseñado específicamente para este tipo de drones.
La configuración mínima para el seguimiento de drones sería cualquier conjunto NIA con capacidad 3D. Por ejemplo, tres balizas estacionarias + 1 baliza móvil + 1 módem y Non-Inverse Architecture (NIA) o Multi-Frequency NIA (MF NIA) ya serían suficientes para el dron.
Drones para inspección de almacenes
El uso de drones para la inspección de almacenes es bastante popular: encontrar palés perdidos, seguridad, etc. Sí, es una tarea factible, pero muy compleja en la práctica:
- Entorno muy exigente en general
- Los drones caen y se rompen => alto coste del error
- Los drones son potencialmente peligrosos de volar y muy difíciles de desarrollar y utilizar
No obstante, la solución es muy prometedora. Por ello, los fabricantes de drones o los constructores de sistemas de almacén utilizan nuestro sistema de posicionamiento interior para dichas soluciones. En el vídeo, explicamos las particularidades del entorno (pasillos estrechos y estantes altos), cómo afectan las particularidades a la precisión y cómo construir el sistema de forma óptima.
Plataforma de aterrizaje autónoma para drones
Es posible construir una plataforma de aterrizaje autónoma para un dron. Incluso puede ser móvil:
- Coloca cuatro Super-Beacons estacionarios apuntando hacia arriba en los bordes de la plataforma. Cuanto más grande sea la plataforma, mayor será la precisión de la distancia
- Coloca dos Super-Beacons móviles apuntando hacia abajo
El dron vuela usando GPS RTK regular o incluso GPS cuando está lejos y a más de 30m de la plataforma. Queda vinculado a las coordenadas del Indoor “GPS” y aterriza basándose en estas coordenadas. Como se ha mencionado, la plataforma puede ser estática respecto a la Tierra o estar en movimiento. Esto no importa para el dron. Así, por ejemplo, puedes aterrizar con precisión sobre un vehículo en movimiento.
Vuelo autónomo por parte de nuestros clientes
Vuelo autónomo por parte de nuestros clientes con Pixhawk + Marvelmind
"¿Puedo volar el DJI Mavic de forma autónoma en interiores?
Sí, puedes.
Aprende más sobre volar drones DJI de forma autónoma en interiores.