🇪🇸 Más páginas en español:Sobre nosotros Robots AGV Drones Carretillas DJI Personas Métodos de pago Envío
Tecnología
Descripción General de la Tecnología Marvelmind
Explore la tecnología central detrás del sistema de posicionamiento interior con precisión centimétrica de Marvelmind: RTLS basado en ultrasonido, arquitecturas de sistema y guías de ingeniería para robots industriales reales, montacargas, drones y seguimiento de personas. Utilice esta página como punto de entrada a todos los artículos técnicos sobre cómo funciona Marvelmind y cómo se compara con otras tecnologías RTLS.
Solicitar Consulta Técnica ↗
Hable directamente con los ingenieros de Marvelmind sobre su almacén, fábrica, túnel o laboratorio específico.
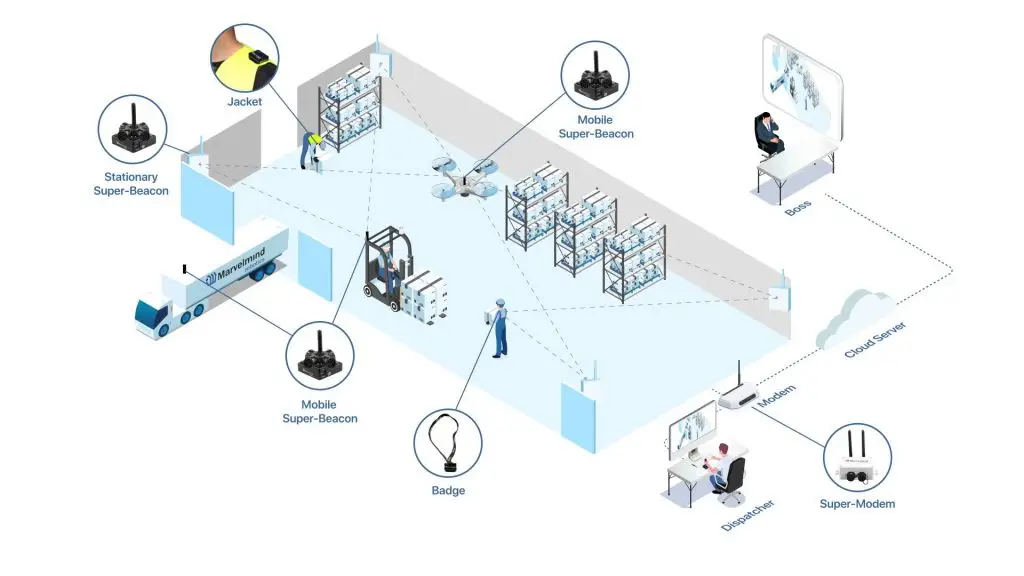
El RTLS basado en ultrasonido de Marvelmind combina balizas estacionarias y móviles, módems sincronizados y software para un posicionamiento interior preciso.
Artículos de Tecnología Central
Comience con estos artículos fundamentales para comprender por qué Marvelmind es más preciso que UWB y cómo se construye e implementa el sistema.Fundamentos
Por Qué el Ultrasonido Supera a UWB en el Posicionamiento Interior Industrial
Explicación basada en la física de por qué el tiempo de vuelo por ultrasonido proporciona una precisión de hasta ±2 cm y por qué es más robusto que UWB en entornos industriales con mucho metal y ruido de radiofrecuencia.Arquitectura
Cómo Funciona el Sistema de Posicionamiento Interior Marvelmind
Descripción detallada de los componentes del sistema, arquitecturas compatibles (IA, NIA, MF-NIA), reglas de instalación, submapas y opciones de escalado para grandes almacenes, fábricas y túneles.Realidad del Mercado