Präzises Indoor-Positionierungssystem für autonome Drohnen
Wir erklären, wie man autonome Innenraumdrohnen entwirft und baut und welche Indoor-Positionierungssysteme man zur Verfolgung von Innenraumdrohnen verwendet, wenn diese nicht autonom sind.
Obwohl wir uns auf Innenraumdrohnen und autonome Indoor-Drohnennavigation konzentrieren, funktioniert das Drohnen-Positionierungssystem auch im Freien einwandfrei.
Für Drohnen auf Basis von Pixhawk/ArduPilot/PX4 verwenden Sie bitte den folgenden Link.


Für DJI-Drohnen in Innenräumen gibt es eine eigene Seite: Wie fliegt man eine DJI-Drohne autonom in Innenräumen?
Lesen Sie hier, um zu erfahren, wie man zwischen DJI und Pixhawk wählt.
Weitere Marvelmind-Hilfsquellen zum Thema Drohnen
- Kundenerfolg: Autonomer Flug einer Innenraumdrohne auf Basis von PixHawk + ArduPilot
- Beacons mit externer Stromversorgung betreiben
- Indoor-Positionierungssystem für Drohnenwettbewerbe
- Wie viele stationäre Beacons benötigen wir, um unseren Bürobereich für eine autonome Indoor-Patrouillendrohne abzudecken?
- Verwendung von IA für Drohnen
- DJI indoor verfolgen: Zwei-Raum-Edition
- Präzises XYZ-Tracking für Indoor-Drohnenschwärme und Indoor-Drohnenvorführungen
- Autonome Drohnenlandeplattform
- Genauigkeitsverlust bei präzisen Indoor-Positionierungssystemen und wie man ihn vermeidet
- Hilfe: PixHawk + PX4 + gekoppelte Beacons für Position + Richtung anstelle von Magnetometern
- Hilfe: Autonome Drohnen für die Inspektion in einem Lagerhaus
- Verfolgung einer Mikrodrohne in Innenräumen über große Entfernungen
- Mikrodrohnen-Tracking mit aktiviertem Echtzeit-Player
- Mikrodrohnen-Tracking mit deaktiviertem Echtzeit-Player
- Präzises (±2 cm) Indoor-Tracking in XYZ ohne GPS/GLONASS
- Präzises (±2 cm) Drohnen-Tracking im Freien ohne GPS/GLONASS – Horizontalflug auf zwei Ebenen
- Vollständig autonomer Flug in Innenräumen
- Hilfe: Mobiles Beacon am Kopter befestigen
- Hilfe: Z-Koordinaten für Kopter – ausführliche Erklärung
- Kopter im Freien mit wenigen Zentimetern Genauigkeit verfolgt
Empfohlenes Indoor-RTLS für Drohnen – schnelle Hinweise
Wenn Sie neu im Marvelmind Indoor-„GPS”-System sind und nicht sicher sind, was Sie wählen sollen, holen Sie sich das Starter Set Super-MP, wobei MP für Mehrzweck steht – das ist Ihre sicherste Wahl.
Weitere Details finden Sie in den unten aufgeführten empfohlenen Optionen.
Insgesamt die beste und sicherste Wahl, wenn Sie nicht sicher sind, was Sie wählen sollen oder welche genauen Experimente Sie durchführen werden, aber gleichzeitig größtmögliche Flexibilität und Leistung wünschen.
Es ist die beste Wahl, wenn Sie eine Verbindung zu PixHawk herstellen müssen, da am Super-Beacon zwei Pins für die Verbindung zu PixHawk direkt verfügbar sind. Mehr erfahren.
Konfiguration:
– https://marvelmind.com/product/starter-set-super-mp-3d/
– https://marvelmind.com/product/super-beacon/ – ein zusätzliches mobiles Beacon für die Paired-Beacons-Konfiguration, um sowohl Position als auch Richtung zu erhalten. Mehr über die Paired Beacons Demo erfahren
Das Set ist für Mikrodrohnen (<100 g) konzipiert, da das mobile Beacon Mini-TX winzig und leicht ist. Mini-TX kann eine Reichweite von bis zu 15–20 m zu den stationären Beacons abdecken, was für die meisten realen Anwendungsfälle ausreicht. Das Set kann auch für größere Drohnen verwendet werden, aber die Ultraschallreichweite des Mini-TX ist kleiner als die der Super-Beacons. Wenn das Gewicht also nicht entscheidend ist, ist die beste Wahl die Verwendung von Super-Beacons als mobile Beacons. Nur wenn das Gewicht wirklich das einzige Problem ist, ist Mini-TX unschlagbar.
Mini-TX ist hervorragend für das Tracking geeignet. Die neue Version Mini-TX-2 ist auch ideal für die Verbindung mit PixHawk, da sie über einen speziellen 6-poligen Stecker mit zwei Pins verfügt, die für die PixHawk-Konnektivität (TX + GND) vorgesehen sind – ähnlich wie beim Super-Beacon. Beachten Sie, dass ältere Mini-TX-Versionen – die 2022 und früher geliefert wurden – keinen 6-poligen Stecker an der Unterseite hatten.
Konfiguration:
– https://marvelmind.com/product/starter-set-nia-03-smalldrone
Eine erweiterte Version der Option „Starter Set Super-MP-3D + Super-Beacon – Position+Richtung an der Drohne”.
Das Precise-Z, das physisch aus 2 zusätzlichen stationären Beacons besteht, ermöglicht präzise Z-Koordinaten in allen Z-Bereichen.
Mehr erfahren:
– Platzierungshandbuch – Precise-Z-Folie
– Videoerklärung zu Z und Platzierung von Beacons
Konfiguration:
– https://marvelmind.com/product/starter-set-super-mp-3d/
– https://marvelmind.com/product/super-beacon/ – ein zusätzliches mobiles Beacon für die Paired-Beacons-Konfiguration, um sowohl Position als auch Richtung zu erhalten. Mehr über die Paired Beacons Demo erfahren
– https://marvelmind.com/product/super-beacon/ – zusätzliche stationäre Beacons für die Precise-Z-Funktion

Verwendung von Marvelmind Indoor-„GPS" für Drohnen und Quadkopter
Das Marvelmind Indoor-Positionierungssystem bzw. Marvelmind Indoor-„GPS” wird auf viele verschiedene Arten für Drohnen oder Quadkopter eingesetzt:
- Steuerung autonomer Indoor-Drohnen und Outdoor-Drohnen. Outdoor-Drohnen – Steuerung für „die letzte Meile”, die bei Bedarf Hunderte von Metern betragen kann, aber der maximale Abstand vom mobilen Beacon an der Drohne zu drei oder mehr stationären Beacons, die das mobile Beacon versorgen, darf nicht überschritten werden
- Verfolgung von Indoor-Drohnen
- Automatische Indoor- und Outdoor-Drohnenlandung oder Drohnenlandeunterstützung
- Lagerinspektion mit autonomen Indoor-Drohnen
- Drohnenvorführungen


Gewicht und Größe sind die größten Einschränkungen für kleine Drohnen
Das Indoor-Positionierungssystem für eine kleine Drohne unterscheidet sich nicht wesentlich von anderen Indoor-Positionierungssystemen, wie z. B. solchen, die für größere Drohnen oder andere 3D (XYZ)-Indoor-Positionierungssysteme verwendet werden.
Die einzige Besonderheit ist das Gewicht des mobilen Beacons (Tags), das an der Drohne installiert ist. Dies wird durch eine abgespeckte Version des Mini-TX gelöst, bei der das Gehäuse entfernt, der Akku entfernt oder durch einen sehr leichten Akku ersetzt wird.
Darüber hinaus sind kleinere Drohnen oft einfacher aufgebaut – ihnen fehlt beispielsweise ein Bordcomputer oder Autopilot wie Pixhawk und ähnliche Modelle. Die gesamte Intelligenz kommt von der Bodenstation. Es gibt jedoch Ausnahmen.

{kind=link}
Drohnenschwärme und Drohnenvorführungen können Dutzende oder sogar Hunderte von Drohnen umfassen. Wenn sie im Freien fliegen, funktioniert RTK GPS sehr gut. Aber RTK GPS funktioniert in Innenräumen nicht.
Ein typisches Indoor-Positionierungssystem für Drohnen würde auf NIA basieren – ein mobiles Beacon in NIA sendet Ultraschall aus. In diesem Fall wäre die praktische Anzahl der unterstützten Drohnen jedoch 1–8, da bei NIA die Positionsaktualisierungsrate pro Drohne proportional zur Anzahl der Drohnen sinkt.
IA sollte verwendet werden, wenn der Indoor-Drohnenschwarm aus Dutzenden von Drohnen besteht. Bei IA hört das mobile Beacon jedoch auf den Ultraschall; daher müssen spezielle Lösungen eingesetzt werden, um den Lärm der Propeller zu bekämpfen und den ordnungsgemäßen Betrieb des Systems zu gewährleisten. Mehr über die Lösung erfahren.
Wir werden wöchentlich mit Anfragen nach autonomen Drohnen oder Indoor-Positionierungssystemen für autonome Indoor-Drohnen angesprochen, hauptsächlich für Lagerinspektionen, automatisiertes Barcode-Scannen oder RFID-Lesen.
Es besteht zweifellos ein solider Bedarf für diese Aufgabe und ein starkes Interesse daran, sie mithilfe von Drohnen zu erfüllen.
Ein solches System für reale Anwendungen zu entwickeln ist eine komplexe, aber machbare Aufgabe. Lassen Sie uns die Details der Umsetzung besprechen.

Die Anfälligkeit der Lösung ist das bedeutendste praktische Problem. Es gibt jedoch Lösungen und sogar robuste Alternativen.
Marvelmind Indoor-„GPS" unterstützt PixHawk mit ArduPilot und PX4
Marvelmind Indoor-„GPS” unterstützt sowohl PixHawk mit ArduPilot als auch PX4:
- Marvelmind und ArduPilot – Link zu ArduPilot.org
- Marvelmind und PX4 Integrationshandbuch – Schritt-für-Schritt-Anleitung mit Einstellungen und Screenshots für Mission Planner, PixHawk und die HW-Konnektivität
- PixHawk und Marvelmind Integrationshandbuch – eine Schritt-für-Schritt-Anleitung für die Integration von PixHawk, ArduPilot und Marvelmind für Drohnen
Marvelmind und PixHawk
Die Kombination von Marvelmind Indoor-„GPS” und PixHawk ist der einfachste und schnellste Weg, um in Innenräumen autonom zu fliegen.

Indoor-Positionierungssystem für Quadkopter richtig aufbauen
Es gibt einige, aber recht einfache Aspekte, die für einen erfolgreichen Innenraumflug berücksichtigt werden müssen:
- Handbuch für autonome Kopter-Einstellungen – grundlegende und praktische Empfehlungen für die Einrichtung des Indoor-„GPS”-Systems zur Verwendung mit autonomen Koptern/Drohnen in Innen- und Außenbereichen
- Platzierungshandbuch – praktische Ratschläge und Beispiele, wie das Marvelmind Indoor-„GPS”-System montiert werden kann, um die beste Leistung in verschiedenen Anwendungen und Konfigurationen zu erzielen
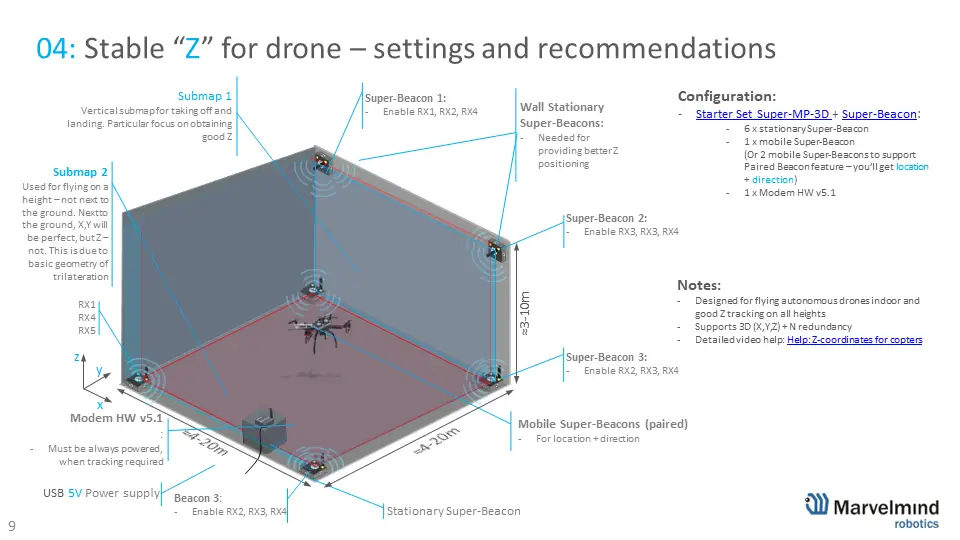
- Hilfe: Z-Koordinaten für Kopter – Ausführliche Erklärung – YouTube-Video, das erklärt, wie die stationären Beacons richtig platziert werden, um eine gute Z-Genauigkeit zu erzielen. Wenn Sie den Rat nicht befolgen können, weil Ihre Umgebung die Verwendung der Precise-Z-Konfiguration mit 4+2 stationären Beacons nicht zulässt. Beachten Sie, dass diese Konfiguration nur für fortgeschrittene Benutzer und nur dann empfohlen wird, wenn ein weitaus grundlegenderes, robusteres und sogar genaueres Setup mit vier stationären Beacons über dem Flugbereich nicht verwendet werden kann oder unpraktisch ist
Auf der Produktseite finden Sie verschiedene Starter-Set-Optionen.
Beachten Sie, dass nur drei stationäre Beacons eine geringe Widerstandsfähigkeit gegen Blockierungen für das 3D (XYZ)-Tracking bieten würden. Jede Verdeckung eines stationären Beacons – eine Nicht-Sichtlinie/Hörsituation – führt zu keinem Tracking oder fehlerhaftem Tracking – wie beim GPS: „keine Satellitensicht = keine GPS-Koordinaten = kein Tracking”.
Daher empfehlen wir mindestens N+1-Redundanz für stationäre Beacons. Und deshalb bestehen unsere Starter-Sets für 3D aus 4 stationären Beacons.
Noch besser ist eine 2N-Redundanz mit vollständig überlappenden 3D-Submaps. Das wären entweder 3+3 oder 4+4 stationäre Beacons. Das System würde automatisch die beste Submap für das Tracking auswählen. Ein solches System ist sehr widerstandsfähig, und bei richtiger Platzierung der Beacons können Sie sogar in komplexen Räumen mit Säulen fliegen, ohne Tracking-Probleme zu haben.
Der Schlüssel zu hervorragendem Tracking ist eine ordnungsgemäße Abdeckung an jedem Flugpunkt. Das bedeutet, dass die mobilen Beacons an der Drohne drei oder mehr stationäre Beacons derselben Submap mit klarer, direkter Sichtlinie/Hörlinie innerhalb von 30 m haben müssen.
Die richtige Platzierung ist in der Regel entscheidend und wichtig für Drohnen, da sie 3D-Fähigkeiten erfordern; Drohnen sind schnell, und Fehler können besonders kostspielig sein. Worauf ist zu achten?
- Die wichtigste Anforderung für gutes Tracking oder autonomen Flug ist eine klare Sichtlinie/Hörlinie von den mobilen Beacons an der Drohne zu 3 oder mehr stationären Beacons
- Verlassen Sie sich in Innenräumen nicht auf Magnetometer. Verwenden Sie die Paired-Beacons-Konfiguration für Position+Richtung
- Platzieren Sie stationäre Beacons so, dass die Winkel vom mobilen zu den stationären Beacons 30 Grad oder mehr betragen. Sehen Sie eine ausführlichere Erklärung im Video
- Verwenden Sie die Precise-Z-Konfigurationen, wenn es auf andere Weise nicht möglich ist, geeignete Winkel zu den stationären Beacons zu erreichen
Das Tracking einer Indoor-Drohne in einem großen offenen Raum ist sehr einfach. Mit einem Starter Set Super-MP oder Starter Set NIA-SmallDrone kann das präzise 3D-Tracking-System in 10–15 Minuten eingerichtet werden, einschließlich Auspacken und Software-Updates, bei einem gerade erhaltenen Set. Wenn Sie alle anfänglichen Software-Updates vor der Einrichtung abgeschlossen haben, kann das System in unter einer Minute eingesetzt werden.
Autonomer Flug ist eine deutlich komplexere Aufgabe, da Sie eine Drohne präzise verfolgen und ihren Autopiloten mit der Drohne/dem Chassis integrieren müssen, das typischerweise aus verschiedenen Teilen besteht (Chassis, Motoren, Motortreiber, Telemetrie, Fernsteuerung). Und darüber hinaus muss der Autopilot wie oben beschrieben mit dem Indoor-Positionierungssystem integriert werden.
Wenn der autonome Flug einer einzelnen Drohne bereits eine anspruchsvolle Aufgabe ist, so ist der autonome Flug eines Drohnenschwarms der Gipfel dieser Komplexitätspyramide. Er ist noch herausfordernder, aber dennoch machbar, wenn man es Schritt für Schritt angeht.
Bevor wir tief in das Thema Indoor-Drohnenschwärme eintauchen, beantworten wir die grundlegende Frage: „Wie fliegen diese tausenden von Drohnen am Himmel?” – nun, das ist ganz einfach – sie verwenden das RTK GPS-Positionierungssystem. Beachten Sie jedoch, dass RTK GPS auf GPS basiert. Wenn kein GPS vorhanden ist, gibt es auch kein RTK GPS. Sobald wir uns also in Innenräumen oder anderen GNSS-freien Bereichen befinden, vergessen Sie das GPS (GLONASS, Beidou, Galileo usw.)
Kleine Drohnen sind zu klein. Große Drohnen sind zu groß
Einen massiven Schwarm kleiner Drohnen zu haben und eine schöne Vorführung zu zeigen wäre großartig. Allerdings:
- Akkugröße vs. Vorführungszeit vs. Drohnengröße
- Autopilot und Indoor-Positionierungssystem haben eine nicht zu vernachlässigende Masse. Es gibt eine untere Grenze für die Größe der Drohnen
- Drohnen benötigen eine Richtung. Die Richtung wird am besten durch zwei oder mehr Positionspunkte an den Drohnen erreicht. Je weiter sie voneinander entfernt sind, desto besser die Winkelgenauigkeit
Wenn Drohnen zu groß sind:
- Es ist schwierig, sie voneinander getrennt zu halten. Sie benötigen einen größeren Sicherheitsabstand zwischen ihnen und dadurch einen größeren Raum für die Vorführung
- Größere Drohnen sind schwerer, lauter und gefährlicher. Lärm und Schutznetze können die gesamte Idee der Vorführung zunichte machen
Drohnen im Glauben lassen, sie seien allein
In vielen Fällen ist es möglich, den autonomen Flug mehrerer Drohnen so einzurichten, dass sie nicht einmal wissen, dass es andere Drohnen in ihrer Nähe gibt. Sie glauben, so einzigartig und so außergewöhnlich zu sein. Es liegt in Ihrem Interesse, sie in diesem naiven Glauben zu lassen, denn es ist der einfachste Weg, Drohnenschwärme zu realisieren.
Beispiele für Konfigurationen von Indoor-Positionierungssystemen für Drohnenvorführungen auf Basis von Marvelmind Indoor-„GPS"
Durch die Kombination von Lösungen ist es möglich, einen Drohnenschwarm mit IA zu fliegen: Indoor-Positionierungssystem für Drohnenvorführungen und -schwärme.
Diese komplexe Lösung ist möglicherweise nicht geeignet, wenn Sie neu in unserem System oder bei Drohnen im Allgemeinen sind. Sie bietet jedoch die beste Leistung für Indoor-Drohnenvorführungen, da sie den gleichzeitigen Flug mehrerer autonomer Drohnen ohne Reduzierung der Positionsaktualisierungsrate ermöglicht und die höchste Positionierungsgenauigkeit von ±2 cm bietet.
Konfiguration:
- IA
- 4 x https://marvelmind.com/product/super-beacon/ – stationäre Beacons, die rund um und oberhalb des Flugbereichs platziert werden
- 1 x Modem v5.1
- 10 x Mini-RX + Mikrofon – ein hybrides mobiles Beacon für jede Drohne
Wie oben erläutert, ist das Erste, was entschieden werden muss, ob Sie eine Richtung basierend auf den Paired Beacons benötigen. Wenn ja, benötigen Sie zwei mobile Beacons pro Drohne. Wenn nicht, nur ein mobiles Beacon pro Drohne.
Es ist möglich, mit einem einzelnen mobilen Beacon zu fliegen, aber die Software auf dem Autopiloten muss komplexer sein – nicht von Anfang an, da sie die Richtung und die Korrektur der Gyro-Drift der Drohne während des Fluges bereitstellen muss. Das ist komplex. Machbar. Aber komplex. Und wenn irgend möglich, empfehlen wir immer die Paired-Beacons-Konfiguration als einfache Lösung für die Indoor-Richtungsbestimmung, auch im Stillstand.
Wie oben besprochen, ist dies für Schwarmdrohnen oder Indoor-Drohnenvorführungen jedoch möglicherweise nicht die beste Option. Daher werden wir eine komplexere und anfälligere Option auf Basis eines einzelnen mobilen Beacons als Hauptvariante für eine Drohne annehmen.
Konfiguration:
- MF NIA – MF NIA wird für Drohnenschwärme dringend empfohlen, da NIA zu langsam wäre und Drohnen für IA zu laut sein können
- 4 x https://marvelmind.com/product/super-beacon/ – stationäre Beacons, die rund um und oberhalb des Flugbereichs platziert werden
- 1 x Modem v5.1
- 10 x Super-Beacons – mobile Beacons für zehn Drohnen
- 14 x MF NIA-Lizenzen
Wenn Ihre Drohnen winzig sind und keine 27-g-Last (eine abgespeckte Version des Super-Beacon) tragen können, ist das Mini-TX ohne zusätzlichen Akku und Gehäuse Ihre beste Wahl. In der abgespeckten Konfiguration wiegt es nur 6,7 g.
Das Mini-TX arbeitet jedoch nur auf einer Frequenz (31 kHz). Damit bleibt nur NIA als Option. Wenn Sie also zehn Drohnen haben, beträgt die Positionsaktualisierungsrate pro Drohne 1/10 der System-Positionsaktualisierungsrate. Bei einer kleinen Submap von 5 x 5 m ist es möglich, 20–25 Hz pro System zu erreichen. Die Positionsaktualisierungsrate pro Drohne beträgt damit ~2–2,5 Hz. Diese Positionsaktualisierungsrate ist für Vorführungen mit langsamen Bewegungen geeignet. Aber es ist immer noch viel besser als nichts.
Konfiguration:
- NIA
- 4 x https://marvelmind.com/product/super-beacon/ – stationäre Beacons, die rund um und oberhalb des Flugbereichs platziert werden
- 1 x Modem v5.1 – eine zentrale Steuereinheit des Systems. Sie können die Daten überwachen und die Drohnen darüber steuern
- 10 x Mini-TX – mobile Beacons für zehn Drohnen
UWB-basierte Systeme
UWB-basierte Indoor-Drohnen-Positionierungssysteme unterscheiden sich im Prinzip nicht wesentlich vom Marvelmind Indoor-„GPS”. Natürlich ist die zugrunde liegende Technologie unterschiedlich (Laufzeit von UWB im Vergleich zur Laufzeit von Ultraschall). Aber die Architektur und die Netzwerkelemente sind sehr ähnlich.
Praktische Unterschiede zwischen UWB und Marvelmind Indoor-„GPS”:
- UWB ist etwa zehnmal ungenauer als Ultraschall, d. h. die Drohnen sind in der Luft instabiler
- UWB wird jedoch grundsätzlich nicht durch den akustischen Lärm der Drohnen beeinträchtigt
- UWB kann grundsätzlich mehr Drohnen gleichzeitig unterstützen. Ob UWB in der Praxis mehr Drohnen unterstützt und welche Aktualisierungsrate pro Drohne daraus resultiert, hängt von der UWB-Systemimplementierung ab. IA-basierte Systeme können UWB-basierte Systeme in Bezug auf Kapazität leicht konkurrieren und sie in Bezug auf Genauigkeit um den Faktor zehn übertreffen
Optische Systeme – QR-Codes rund herum
Wird immer beliebter aufgrund potenzieller Einfachheit:
- Eine Kamera zeigt nach unten auf QR-Codes (oder andere spezielle Muster) auf dem Boden. QR-Codes liefern sowohl Position als auch Richtung
- QR-Codes können sich über den Drohnen befinden (Decken), wenn das praktischer ist
- QR-Codes können sich rund um die Drohne befinden, dann sind jedoch mehr Kameras oder spezielle Fisheye-Kameras erforderlich
Vorteile:
- Relativ kostengünstiges Positionierungssystem
- Kein Bedarf an aktiven Beacons in der Umgebung
Nachteile:
- Bedarf an QR-Codes in der Umgebung – manchmal sind sie entweder unerwünscht oder sogar unmöglich
- Anforderungen an spezielle Beleuchtung
- Triangulationsbasiertes System, daher müssen QR-Codes dicht und ziemlich nah sein, sonst leidet die Positionsgenauigkeit
Erwägen Sie eine Alternative: Autonome Drohnenlandeplattform.
Motion-Capture-basierte Systeme
Sehr beeindruckende Drohnenvorführungen lassen uns glauben, dass Drohnen so intelligent sind. Doch dieser Eindruck ist sehr trügerisch. Das Positionierungssystem ist das Herzstück des Setups – nicht die Drohnen. Drohnen sind eher simpel. Sie wissen nicht einmal, dass sie verfolgt werden. Außerdem werden sie vollständig ferngesteuert, basierend auf den Positionsdaten des Tracking-Systems. Damit sind sie sogar noch simpler. Aber das ist in Ordnung. Es spielt keine Rolle, wie die Leistung erbracht wird, solange sie beeindruckend und wirklich beeindruckend ist.
Motion-Capture-basierte Systeme:
- Sie sind teuer oder sehr teuer, da sie schnelle Hochauflösungs-Infrarotkameras, viel Datenverbindung (Verkabelung) zwischen den Kameras und dem Zentralcomputer, einen leistungsstarken Computer und spezielle Infrarotbeleuchtung erfordern
- Sie sind naturgemäß auf den abgedeckten Bereich beschränkt, da die Positionsbestimmung auf Triangulation basiert und in der Regel auf 10 x 10 m oder so begrenzt ist
- Auf der positiven Seite sind die Tracker an den Drohnen leicht und passiv – nur Lichtreflektoren
Beispiele für die Implementierung von präziser Indoor-Positionierung, Tracking und Navigation für Drohnen mit Marvelmind Indoor-„GPS"
Präzises (±2 cm) Tracking des DJI Phantom Quadkopters in Innenräumen in 3D (XYZ)
- Präzises Tracking in X, Y, Z (XY-Ansicht + XZ-Ansicht + YZ-Ansicht)
- Rohdaten und nachverarbeitete Daten vom Dashboard-Player – beachten Sie, dass dasselbe heute nicht in der Nachverarbeitung, sondern im Echtzeit-Player verfügbar ist
- Das DJI-Ökosystem ist geschlossen, zumindest für die Phantom- und Mavic-Serie. Daher ist es möglich, den Phantom zu verfolgen, aber nicht autonom in Innenräumen zu fliegen (ohne tieferes Hacking)
- Mehr erfahren über Autonomes Fliegen von DJI-Drohnen in Innenräumen
Präzises (±2 cm) Tracking des DJI Phantom Quadkopters im Freien in 3D (XYZ)
- Präzises (±2 cm) Tracking in XYZ (XY-Ansicht + XZ-Ansicht + YZ-Ansicht) – dasselbe wie oben, aber im Freien
- Dieselbe Precise-Z-Konfiguration bestehend aus 4+2 stationären Beacons wird in dieser Demo und oben verwendet. Mehr im Platzierungshandbuch
- Mehr erfahren über Autonomes Fliegen von DJI-Drohnen in Innenräumen
Vollständig autonomer Flug in Innenräumen
- Kleiner Kopter fliegt vollständig autonom und verlässt sich dabei auf Marvelmind Indoor-„GPS”
Verwendung von IA für Indoor-Drohnen-Tracking und Indoor-Drohnenschwärme
Durch die Kombination von Lösungen ist es möglich, IA für die Indoor-Drohnenpositionierung zu verwenden:
- Spezieller Ultraschalldeflektor, der das Mikrofon vor dem Lärm der eigenen Propeller schützt
- Stationäre Beacons deutlich oberhalb der Drohne platzieren
- Verwendung spezieller scharfer und schmalbandiger DSP-Filter
Indoor-Tracking kleiner und Mikrodrohnen
Es ist möglich, sogar Mikrodrohnen (unter 100 g) mithilfe von Mini-TX-Beacons zu verfolgen.
Starter Set NIA-SmallDrone ist speziell für diese Art von Drohnen konzipiert.
Die Mindestkonfiguration für das Drohnen-Tracking wäre ein beliebiges NIA-Set mit 3D-Fähigkeit. Beispielsweise wären drei stationäre Beacons + 1 mobiles Beacon + 1 Modem und Non-Inverse Architecture (NIA) oder Multi-Frequency NIA (MF NIA) bereits für die Drohne ausreichend.
Drohnen für die Lagerinspektion
Die Verwendung von Drohnen für die Lagerinspektion ist sehr beliebt – Suche nach verlorenen Paletten, Sicherheit usw. Ja, es ist eine machbare Aufgabe, aber in der Praxis sehr komplex:
- Sehr herausfordernde Umgebung im Allgemeinen
- Drohnen fallen und brechen => hohe Fehlerkosten
- Drohnen sind potenziell gefährlich zu fliegen und schwierig zu entwickeln und einzusetzen
Dennoch ist die Lösung vielversprechend. Daher verwenden Drohnenbauer oder Entwickler von Lagersystemen unser Indoor-Positionierungssystem für solche Lösungen. Im Video erklären wir die Besonderheiten der Umgebung (enge Gänge und hohe Regale), wie sich die Besonderheiten auf die Genauigkeit auswirken und wie das System optimal aufgebaut werden kann.
Autonome Landeplattform für Drohnen
Es ist möglich, eine autonome Landeplattform für eine Drohne zu bauen. Sie kann sogar eine bewegliche sein:
- Sie platzieren vier stationäre Super-Beacons, die nach oben zeigen, an den Ecken der Plattform. Je größer die Plattform, desto besser die Genauigkeit der Entfernungsmessung
- Sie befestigen zwei mobile Super-Beacons, die nach unten zeigen
Die Drohne fliegt mit normalem RTK GPS oder sogar GPS, wenn sie weit entfernt und bis zu 30 m von der Plattform entfernt ist. Sie ist auf die Indoor-„GPS”-Koordinaten eingestellt und landet anhand dieser Koordinaten. Wie erwähnt, kann die Plattform relativ zur Erde statisch oder in Bewegung sein. Das spielt für die Drohne keine Rolle. So können Sie beispielsweise präzise auf einem fahrenden Fahrzeug landen.
Autonomer Flug durch unsere Kunden
Autonomer Flug durch unsere Kunden mit Pixhawk + Marvelmind
„Kann ich DJI Mavic autonom in Innenräumen fliegen?
Ja, das können Sie.
Mehr erfahren über Autonomes Fliegen von DJI-Drohnen in Innenräumen.