🇩🇪 Weitere Seiten auf Deutsch:Über uns Roboter Drohnen Gabelstapler DJI-Drohnen Personen Zahlung Versand
Technologie
Marvelmind Technologieübersicht
Entdecken Sie die Kerntechnologie hinter Marvelmind’s zentimetergenauem Indoor-Positionierungssystem: ultraschallbasiertes RTLS, Systemarchitekturen und technische Leitfäden für echte Industrieroboter, Gabelstapler, Drohnen und die Personenverfolgung. Nutzen Sie diese Seite als Einstiegspunkt zu allen technischen Artikeln darüber, wie Marvelmind funktioniert und wie es sich mit anderen RTLS-Technologien vergleicht.
Technische Beratung anfragen ↗
Sprechen Sie direkt mit Marvelmind-Ingenieuren über Ihr spezifisches Lager, Ihre Fabrik, Ihren Tunnel oder Ihr Labor.
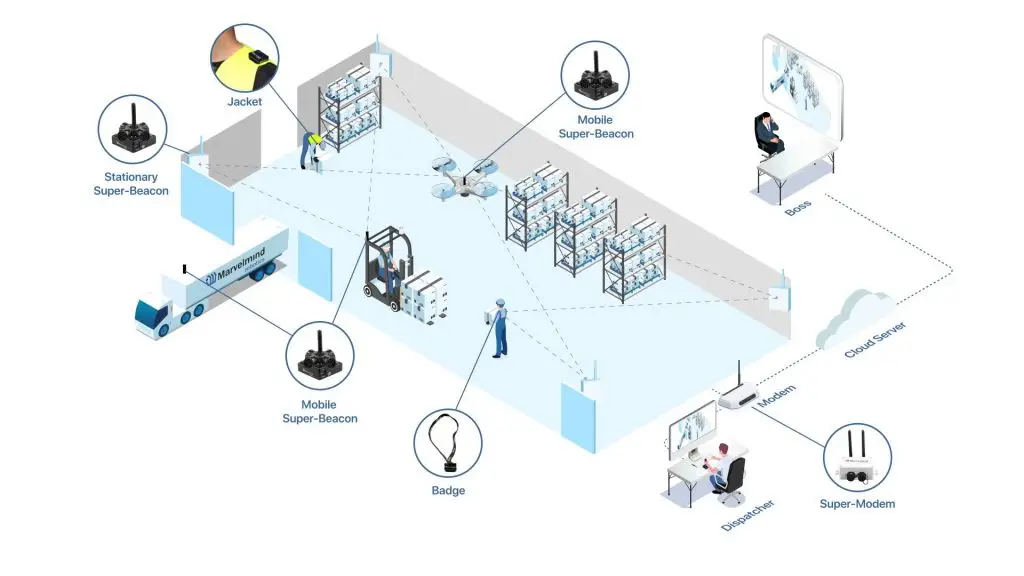
Marvelmind ultraschallbasiertes RTLS kombiniert stationäre und mobile Beacons, synchronisierte Modems und Software für präzise Indoor-Positionierung.
Grundlegende Technologieartikel
Beginnen Sie mit diesen grundlegenden Artikeln, um zu verstehen, warum Marvelmind genauer als UWB ist und wie das System aufgebaut und eingesetzt wird.Grundlagen
Warum Ultraschall UWB bei der industriellen Indoor-Positionierung übertrifft
Physikalische Erklärung, warum Ultraschall-Time-of-Flight eine Genauigkeit von bis zu ±2 cm bietet und warum es in metallreichen, HF-verrauschten Industrieumgebungen robuster als UWB ist.Architektur
Wie das Marvelmind Indoor-Positionierungssystem funktioniert
Detaillierte Übersicht der Systemkomponenten, unterstützter Architekturen (IA, NIA, MF-NIA), Installationsregeln, Teilkarten und Skalierungsoptionen für große Lager, Fabriken und Tunnel.Marktrealität