Home » How to build indoor positioning system – terminology
Indoor positioning system terminology
For autonomous robots, drones, forklifts, cranes, VR/AR, people, and other industrial applications
But with our little help and explanations, of course, citing Wikipedia and other sources, the terms become much clearer.
If some key terms are missing or even incorrectly explained, please email us at info@marvelmind.com, and we will address it.
Executive Summary:
This page explains the key terms used in indoor positioning and real-time locating systems.
- Anchor
- Angle of arrival (AoA)
- Augmented reality (AR)
- Beacon
- Beidou
- BLE
- Bluetooth
- Glonass
- GNSS
- GPS
- Handover zone
- iBeacon
- Indoor "GPS"
- Indoor Positioning System (IPS)
- Inertial Measurement Unit (IMU)
- Inertial Navigation System (INS)
- Inverse Architecture (IA)
- IPxx
- LIDAR
- Line of sight (LoS)
- LoRa
- Map
- MEMS
- Mobile beacon ("hedgehog" or "hedge")
- Modem
- Multi-Frequency NIA (MF NIA)
- Multilateration
- Non-Inverse Architecture (NIA)
- Non-line of sight (Non-LoS)
- RSSI
- RTK GPS
- Real-time Location System (RTLS)
- Stationary beacon ("owl")
- Service zone
- Submap
- Super-map
- Super-Super-Modem
- Tag
- Time of flight (ToF)
- Time of arrival (ToA)
- Triangulation
- Trilateration
- Ultra-wideband (UWB)
- Virtual reality (VR)
- WiFi
- ZigBee
Anchor
Anchor – a common name for stationary beacons in ultra-wideband (UWB) systems. In Marvelmind Indoor Positioning System, anchors are called stationary beacons.
When an indoor positioning system (IPS) or a real-time locating system (RTLS) determines the location of a mobile object, it calculates it as a location of a mobile beacon (tag) installed on the mobile object in the coordinate system of anchors. Anchors (stationary beacons) are the reference points for the positioning of mobile beacons (tags).

Angle of arrival (AoA)
BLE-based indoor positioning systems use AoA as a method to improve accuracy. Some reports claim that the accuracy improves up to 3 times and can reach ~1m, albeit for more expensive and complex BLE anchors.
Typical BLE-based indoor positioning systems have poor accuracy of 2-5 meters because BLE-based systems rely on RSSI to estimate the distance between beacons and tags. RSSI is an unreliable criterion since there is multi-path propagation indoors. As a result, at the same point with the same distance between the BLE anchor and the BLE tag, the radio signal strength (RSSI) may differ by 10:1.
Bluetooth with AoA allows combining two sources of data: 1) Distance estimation based on RSSI, and 2) Signal angle of arrival (AoA) based signal from several antennas placed on calculated distances. Combining the data and using sophisticated algorithms allows for decreasing the inaccuracy of BLE-based IPS systems.
Augmented reality (AR)
Augmented Reality (AR) is a flavor of virtual reality (VR) that combines VR with the real world. A typical example of an AR device is Microsoft HoloLens.

AR/VR devices use different types of systems for positioning – inside-out and outside-in. Typically, for AR, it is an optical inside-out system.
Marvelmind Indoor “GPS” is an outside-in system. It is often used to complement AR systems with outside-in tracking to provide “ground truth” and help AR’s systems when the environment is too challenging for their embedded inside-out positioning system.
Beacon
Stationary beacons are used as references (“GPS satellites”) for the mobile beacons (“GPS terminals”) in the indoor positioning systems. Of course, it is not a real GPS – it is GPS-like usage – “GPS”.
Mobile beacons are placed on the mobile objects and tracked by the system. Remember, the indoor positioning system typically doesn’t directly track mobile objects (robots, drones, forklifts, cranes, VR helmets, etc.). It tracks the mobile beacon installed on the mobile object.
Beidou
BLE
Bluetooth Low Energy (BLE) is a wireless communication system. The BLE protocol is not designed for distance measurements. However, relying on RSSI for the distance estimate and employing sophisticated algorithms, it is possible to build decent indoor positioning and navigation systems particularly suitable for tracking mobile phones and guiding people with special navigation apps that use BLE-based positioning for navigation inside shopping malls, airports, and museums.
Typical accuracy of BLE is 2-5m at best, though it depends on the dencity of installation of BLE anchors. Closer anchors = better accuracy = more anchors = higher total infrastructure cost.
Using BLE with AoA improves accuracy up to ~3 times, and reports say that it reaches 1m, but it comes at the expense of more complex and expensive anchors.
Though, BLE is not designed for positioning but is still popular due to the possibility of tracking devices with embedded BLE tags, i.e., regular modern mobile phones. It differentiates BLE from UWB or ultrasound systems, which require tags given to people. In BLE, the mobile phone is a tag. Also, BLE tags and anchors have lower costs than UWB or ultrasound systems.
Although not entirely technically correct, we often use the terms BLE and Bluetooth as synonyms. The technologies are very close and can be supported by the same hardware, but they are not exactly the same and not even compatible.
Bluetooth
Global navigation satellite system (GNSS)
Global navigation satellite system (GNSS) is used to determine the location of GNSS terminals globally as opposed to local positioning systems or indoor positioning systems. If GNSS worked indoors, indoor positioning systems wouldn’t be needed.
The majority of GNSS chipsets and terminals support several GNSS simultaneously. It increases the accuracy and reliability of tracking.
Global positioning system (GPS) is an American version of GNSS. The most known GNSS system is often used as a synonym for GNSS.
GPS works poorly indoors. Thus, there is a need for indoor positioning systems (IPS) or real-time locating systems (RTLS).
GPS typically gives around 5-10m accuracy with open skies. There is a flavor of GPS – RTK GPS – that gives cm-level accuracy.
iBeacon
iBeacons are just BLE mobile beacons/tags by Apple.
As with any BLE and RSSI-based systems, they have very poor location accuracy: immediate, near, and far.
But, taking into account the ease to use and overall “Apple flavor”, iBeacons became a synonym for beacons and indoor positioning technology at some point in time. Luckily, over the years, the flavor has faded away.
Indoor "GPS"
Indoor “GPS” is a brand name used by Marvelmind Robotics for our precise indoor positioning system.
Notice that it is Indoor “GPS” – not Indoor GPS because GPS doesn’t work indoors.
However, our indoor positioning system streams data in the NMEA format – native GPS format. Thus, your devices won’t even notice that they are connected to the Indoor “GPS” but not to real GPS. Thus, virtually no integration is required.
Indoor Positioning System (IPS)
Indoor positioning systems (IPS) are extensively discussed in the chapter: What is indoor positioning system?
Inertial Measurement Unit (IMU)
Inertial Measurement Unit (IMU) is an essential element of indoor positioning systems. Typical IMU for IPS is based on MEMS technology. Of course, there are other – significantly more accurate and hundreds and thousands of times more expensive IMUs, but they are rarely used for industrial IPS because of cost, size, power consumption and other characteristics that make their applicability for industrial applications currently impractical.
Typical MEMS-based IMU contain:
It is worth remembering that magnetometers work poorly and unreliably indoors due presence of magnetic field ferromagnetic materials and strong currents flowing around and distorting the magnetic field.
Thus, Marvelmind beacons don’t have magnetometers inside. But they have 6D MEMS IMU (3D accelerometer + 3D gyroscope).
IPS may exist without IMU, but IMU enriches it significantly with relatively minor additional investments – modem MEMS IMU is unbelievably capable. Thus, the users get along with location data updates, not only the coordinates but also acceleration, pose against gravity, and speed of rotation (gyroscope).
IMU/gyroscope doesn’t give the direction. It provides a change of direction. Thus, for direction, one has to either use a magnetometer/compass that doesn’t work well indoors and is not recommended, or use the Pair Beacons configuration that does provide the direction even in static, or rely only on the dynamic determination of direction – possible on with moving mobile objects and precise indoor positioning.
In the video below, the robot-car didn’t have the Paired Beacons but using IMU, precise Marvelmind IPS, and special algorithms, the robot was able to determine the direction and follow the waypoints properly.
Inertial Navigation System (INS)
INS can stand for Inertial Navigation System and Indoor Navigation System, which is confusing.
For the sake of clarity, let’s refer to INS as the Inertial Navigation System.
It shall be very clearly put in plain English. Purely inertial IPS for industrial applications doesn’t exist commercially. IMU-based indoor positioning systems are a misleading fantasia. There are so many articles around that propagate a different message that it is easy to start believing or question your sanity because it is hard to believe that so many people can be simply wrong. Copying incorrect information or omitting essential information doesn’t make it right. Thus, let me stress again: inertial indoor positioning systems for industrial applications or tracking on the phone based on the phone’s IMU do not exist today. It is technologically unachievable, unfortunately.
Why don’t IMU-based indoor positioning systems for industrial applications exist? The answer is straightforward: the drift of the accelerometer is too high to provide cm-level accuracy in any reasonable time. By reasonable time, I mean at least seconds or minutes. No, modern MEMS IMUs are incapable of that.
There are reports about space-grade, military-grade, navigation-grade IMUs, etc., that can extend the time of acceptable accuracy of INS to some 10-60 seconds, but for a practically unreasonable cost and still for a very impractically short time.
IPS with IMU sensor fusion exist, and it is one the most accurate, fastest, and most reliable implementation of IPS.
IMU sensor fusion approach achieves results that are unachievable with non-fused technologies by taking the best from both worlds: the IMU world and the world of another technology with which IMU is fused, for example, odometry or Marvelmind Indoor “GPS”.
But! INS with sensor fusion is not an INS anymore, of course. It is an IMU-based system with sensor fusion. The inertial part gives an essential input, but without other inputs – correcting imperfections of IMU, the INS simply wouldn’t work. Not it will be less accurate or less stable, etc. – it won’t work for practical applications at all. Thus, properly, call it a sensor fusion navigation system where IMU is just one of the sources of data.
Inverse Architecture (IA)
Marvelmind Indoor Positioning System is used in a wide variety of applications. Thus, there are three architectures to serve the customers optimally:
IA is good for:
– People tracking
– Forklift tracking
– Multiple beacons without location update reduction
IPxx
Marvelmind Indoor Positioning System can work indoors and outdoors equally well. The only difference is in ingress protection (IPxx) requirement toward network elements.
Marvelmind products that have additional ingress protection:
– Industrial Super-Beacon-Plastic
Remember: IPxx certifications says that the IPxx-level exposure doesn’t kill the device. It doesn’t require that the device can work during the exposure.
IPxx has so many fine prints that it is practically impossible to apply in real life without additional information. Though, IPxx certifications gives some ideas about ingress protection, but not more than ideas.
LIDAR stands for light detection and ranging.
LIDARs are such a powerful tool for autonomous robots and indoor positioning for vehicles in general that it lures and misleads many users. Not trying to diminish the importance of LIDARs; practical notes:
– LIDARs actively used in SLAM
– SLAM is excellent for research but not so for real-life applications
– LIDARs are good for obstacle detection, with some exceptions
– LIDARs are NOT good for positioning in real-life (messy) factory
– High-grade LIDARs remains (and will remain) expensive
– Low-grade (1D or short-range) LIDARs became very viable. Use them
Thus, when the environment is simple, LIDARs work well for positioning. When the environment is complex and changing, LIDARs are “confused,” and proper RTLSs such as Marvelmind Indoor “GPS” or UWB-based indoor positioning systems rescue the situation.
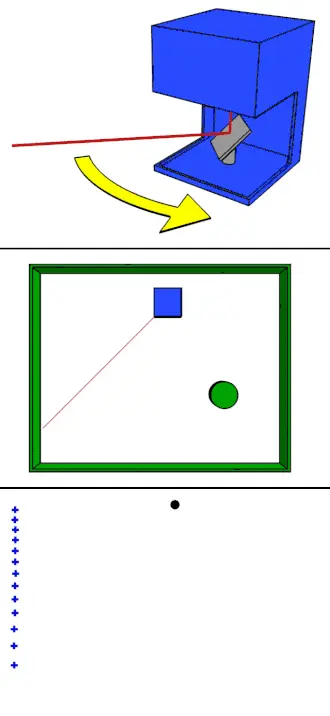
Line of sight is one of the most misunderstood and confusing requirements; for example:
– UWB doesn’t require LoS – not true! UWB requires LoS
– UWB “sees” through radio-transparent materials – correct
– Propagation speed depends on the material: V_wall ≠ V_vacuum
– Ultrasound can go through “breathing cloth” without problems
The practical conclusion is very simple: if you want a precise IPS
or RTLS working in real life, always build it with the line of sight
requirement met.
Use Marvelmind’s internal radio, which is just another proprietary radio protocol comparable with LoRa, for data transmission to and from your mobile beacons:
The pap in the indoor positioning system is correct to call a map of stationary beacons.
The map is not a floorplan of your premises. You can put it as a background to the map, but the floorplan image is interesting to the end-user, mostly – not to the system. The system measures everything in the coordinate system of the map.
Microelectromechanical systems (MEMS) is a key technology for modern IMU. There are many other applications for MEMS, but for INS it is, first of all, MEMS made possible small and prolific IMUs.
Marvelmind is using MEMS IMU in our beacons.
RTLS doesn’t typically track a mobile object. RTLS localizes a mobile beacon on the mobile object. Since there are many types of mobile objects, there many types of mobile beacons for different applications:
– Super-Beacon-Outdoor – the same but with more ingress protection
Multi-Frequency Non-Inverse Architecture (MF NIA) is one of our three architectures. Read more about Marvelmind architectures.
MF NIA characteristics:
– It is NIA: mobile beacons emit ultrasound, and stationary ones receive
– Multi-frequency – mobile beacons emit on different frequencies
– MF NIA has up to 8x higher update rate per hedge than NIA
– Super-Beacon is the best choice for mobile and stationary beacons
– Super-Beacons-Outdoor and Industrial Super-Beacons have IP
– Use MF NIA with multiple drones or noisy robots/mobile objects
– Video guide: NIA vs. IA vs. MF NIA – how to choose?
Modem or router is a central controller of the system. It plays several key roles:
– Central orchestrator of all activities inside the RTLS
– It assures precise clock synchronization between all beacons
– It is the interface towards the Dashboard and users in general
– It manages beacons in general
– It collects telemetry (power supply, temperature, etc.) from them
– It sends setting to the beacons
– It collects data from mobile user’s devices via mobile beacons
– It sends data to mobile user’s devices via mobile beacons

Super-Modem is an advanced version of Modem v5.1. It has additionally:
– WiFi and Bluetooth support
– It can stream and receive UDP data over WiFi
– RS485 support
– Solid housing with special mounting
– Super-Modems are used in Multi-Modem Architecture

Learn basics of the system architectures.
Multilateration is a method to determine a mobile object’s location (XYZ coordinates) by measuring distances from a mobile beacon to a set of stationary beacons with known coordinates.
The most commonly known variant of multilateration is trilateration.
Non-Inverse Architecture (NIA) is one of our three architectures. It is the simplest architecture, and we recommend starting with it when you begin with Marvelmind indoor positioning system.
Read more about Marvelmind architectures.
Since the line of sight is essential for any precise indoor positioning system, the non-line of sight is the main reason for poor tracking.
Let us stress again: the line of sight between the mobile beacon and serving stationary beacons is the most crucial requirement. Non-line of sight doesn’t mean that tracking will be less accurate. It will mean there will be no tracking. There will be jumps and all kinds of mess with tracking and navigation.
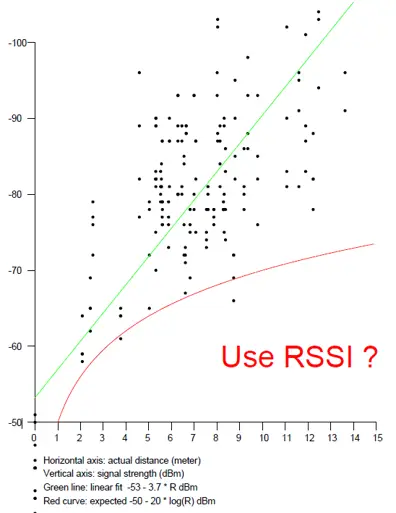
RSSI stands for Received signal strength indication. In indoor positioning, it mostly refers to the systems that use radio signal strength or RSSI to estimate the distance between the stationary beacons (anchors) and mobile beacons (tags).
RSSI is a poor indicator of the distance due to multipath radio signal propagation indoors. It leads to deep fading of radio signal strength (up to 20-30 dB – 100-1000 times by power) or sudden peaks of the RSSI – by 6-10 dB – 4-10 times by power). Thus, if one measure RSSI=-78dBm, for example, it could be the distance of 2.5m or 12m and everything in between, according to the graph below:
RTK GPS stands for Real-time kinematic GPS.
RTK GPS is a variant of differential GPS (DGPS).
The basics of RTK GPS are very simple:
– Regular GPS gives 5-10m inaccuracy, which is often not enough
– Install a reference GPS base with a known location near (1m-10km)
– The base will have the same GPSs errors as our RTK GPS receiver
– Share the measured base’s GPS location with RTK GPS over radio
– Since the errors for both are the same, it is possible to subtract them
– The base is used as correction reference for the RTK GPS receiver
– As a result, get cm-level tracking on RTK GPS

RTK GPS is an excellent positioning system, but it requires GPS. Thus, as soon as the mobile beacon moves indoors, there is no GPS or RTK GPS either. Thus, there is a need for IPS and RTLS, like Marvelmind Indoor “GPS”.
We call stationary beacons “owls” occasionally because they emit ultrasound in IA.
Stationary beacons are placed so that the line of sight is provided to the maximum coverage area with the minimum number of beacons to minimize infrastructure costs.

Stationary beacons are placed so that the line of sight between the stationary and mobile beacons is provided to the maximum coverage area with the minimum number of stationary beacons to minimize infrastructure costs.
Study the Placement Manual for more insights and hints.
Each submap has an area of responsibility for tracking. This area is called a service zone.
It is advised to always specify service zones:
– There is always a service zone anyway – up to 30m by default
– Default service zones are invisible
– Default service zones may results in slower update rate
An overlapping of two neighboring service zones is called a handover zone.
Submap is a basic block of an indoor positioning system that includes 1, 2, 3, or 4 stationary beacons.
It is easier to build huge RTLS maps using submaps. It gives scalability, resiliency, and ease of deployment.
It is convenient to think about Marvelmind IPS as a blend between GPS and cellular networks in terms of a high-level architecture:
– Stationary beacons – GPS satellites or base stations
– Mobile beacons – GPS terminals or mobile phones
– Submaps – cells in cellular networks
Basics about submaps, service zones, and handover zones – video intro to building large maps consisting of many submaps.
- Building submaps (PDF, Video Part 1, Video Part 2) – detailed practical guidance on building large maps consisting of multiple submaps.
Step-by-step guide on building complex maps – start with a simple 2D NIA with one mobile beacon and increase complexity one step at a time.
Super-map
Super-map is a map of maps. There could be thousands of maps in a super-map. Each map is controlled by its modem.
Super-super-modem
Super-super-modem is the central controller of a super-map. As a result of its work, the super-map appears to the end users as just a very large map. It is not split into separate maps that could be on different floors or even different buildings. Super-map appears as a single large map.
Super-super-modems are typically software on the server, often even a remote server. It is usually controlled via an API by the user’s GUI or a system that stays even higher in the hierarchy, such as a warehouse management system (WMS) or ERP system.
Unlike the modems, super-super-modem can be remote and can be just software because it doesn’t interact with beacons physically. Modems control the beacons via the license-free radio interface. Whereas the super-super-modem controls the beacons, if needed, via the modems.
However, typically, the super-super-modem controls the modems and sends the commands to modems, and then modems relay the commands or requests further to beacons, if needed.
Tag
Tag is a common name for a mobile beacon in UWB systems.
Tags can have different forms:
– Tags for outdoor and industrial applications
– Smart Helmets for people
– Smart Belt
There are many more tag options depending on the application and requirements. The underlying technology is the same (ultrasound, UWB, or even BLE), but the appearance and specs (size, battery life, IPxx protection, etc.) can be very different.
ToA is one of the key parameters in time-of-flight (ToF) indoor positioning systems.
Since Marvelmind indoor positioning system is based on the ToF of ultrasound, precise determination of the ToA of ultrasound is critical for accurate distance measurement used in trilateration.
ToF is the crucial element of precise indoor positioning systems relying on multilateration.
Using the time of flight, it is possible to determine the distance.
In Marvelmind IPS, the beacons’ clocks are synchronized to the microsecond level using a radio channel and specially developed radio protocol. As a result, all beacons of Marvelmind IPS live at the same time. Thus, when the modem commands a hedge in NIA to emit ultrasound, all beacons start counting the clocks because they know each other’s time as the modem’s time precisely.
Measuring distances from known points to the mobile object and using multilateration makes it possible to accurately determine the mobile object’s coordinates.
Triangulation is a method to determine a mobile object‘s location (XYZ coordinates) as an intersection on lines coming from three points with known coordinates.
Triangulation is often confused with trilateration.
Trilateration is a subset of multilateration in which only three distances are used to determine the location of the mobile object as an intersection of the distances (circles) from the points of known coordinates to the mobile object.
Marvelmind IPS uses trilateration for 3D (XYZ) positioning and bilateration for 2D (XY) positioning. For 1D positioning, it is just a basic ranging.
Trilateration is often confused with triangulation. In triangulation, the location of a mobile object is determined as an intersection of three directional lines from three points with known coordinates.
Most accurate real-time locating systems today use trilateration – not triangulation – because it is easier to measure distance than the angle precisely.
The distance is usually calculated based on the time of flight (ToF) of a wave, for example, a radio wave, light, or ultrasound wave.
In ToF systems, a very fundamental assumption is used – that the propagation speed is known and fixed, which is not always the case:
– In UWB and LIDARs: when propagating throw solid or liquid materials
– In ultrasound: strongly depends on the air temperature, pressure, etc.
Ultra-wideband (UWB)
Ultra-wideband (UWB) is a radio technology designed for data transmission but can also be used for positioning. It fundamentally differentiates it from BLE, for example, that doesn’t have in-built time-of-flight features, thus making BLE inherently less accurate than RTLS than UWB.
UWB operates in a wide range of frequencies – up to 3.1–10.6 GHz. It is allowed to do so because it emits a very low power per MHz of bandwidth, i.e., below the allowed interference level in these bands. Though, the total emitted power is not so minuscule after all because the band is so wide.
UWB has several flavors:
– Time Difference of Arrival (TDoA)
– Two Way Ranging (TWR)
Both flavors have their own merits. TWR is simpler and provides location data on the infrastructure and tag sides, i.e., good for autonomous objects like robots or drones. Whereas TDoA has the location data on the infrastructure side, i.e., mostly tuned for asset and people tracking but supports dozens and hundreds of mobile objects without location update reduction per tag, unlike TWR UWB systems.
Marvelmind Robotics also has a UWB solution. It uses TWR. Marvelmind UWB is not fundamentally different from other UWB solutions on the market since the same UWB chipset is used. Like laptops using the same processor + chipset have very comparable characteristics.
Virtual reality (VR) is a term for systems and experiences of synthesized worlds, typically computer worlds for games, research, and industrial applications.
The VR always has some sort of positioning system. It could be a basic IMU – for pose and direction and nothing for location – or more advanced – for location as well.
WiFi is a wireless network protocol that is designed for data transmission. Originally, it wasn’t designed for positioning, and positioning was done based on RSSI or fingerprinting. Both provided room-level accuracy, i.e. 5-15 meters. However, the latest versions of WiFi have protocol elements specifically addressing indoor positioning capabilities. There are reports claiming that accuracy reaches 2-3 meters.