Home » How to build indoor positioning system – costs
Indoor positioning system costs
For autonomous robots, drones, forklifts, cranes, VR/AR, people, and other industrial applications
Cost is undoubtedly a mighty factor contributing to the selection of RTLS or IPS. Too high a cost may result in abandoning the project entirely since the system’s benefits may not outweigh the total ownership cost of the RTLS.
Since many factors contribute to the costs, it is essential to be aware of them and minimize them to achieve the highest return on investments while not compromising the performance of the indoor positioning system.
If anything critical is missing, please email us at info@marvelmind.com, and we will address it.
Executive Summary:
This page discusses in detail how much it costs to deploy an RTLS and what the key elements contribute to the cost.
- RTLS costs examples
- Costs of infrastructure
- Cabling costs
- Power supply costs
- Need for additional infrastructure
- Cost of mobile beacons
- Modems and Multi-Modems
- Wireless, antennas and feeders
- Deployment cost
- Software licenses
- Subscription fee, etc
- Potential lost revenue
- Warranty costs
- Costs of spare parts
- Integration costs
- SW and HW customization costs
RTLS costs example
Costs of indoor positioning systems can vary a lot. It depends on the area of coverage, complexity of the area (open space vs. multiple rooms), number of mobile objects to track and many other parameters.
Still, having a ballpark idea of the costs is very useful. What are we talking about – thousands of USD, hundreds of thousands of USD, or millions of USD?
- PoC: 500-2,000 EUR
- Small size case: 2-10k EUR
- Medium size case: 10-50k EUR
- Large size case: 50-500k EUR
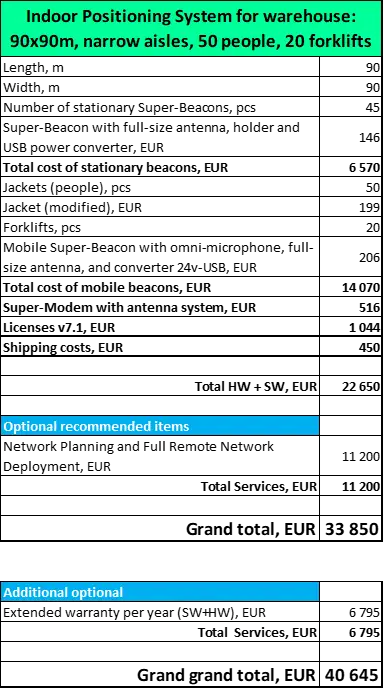
See more details: Typical costs examples from a small PoC project to a larger warehouse.
Cost of infrastructure
Depending the case, the cost of infrastructure may prevail or be a relatively minor part to other costs.
Example of high cost of infrastructure:
– To cover with RTLS the whole 20,000m2 warehouse
– But use only one robot or a drone
The same or even better performance could be achieved with a very sophisticated (and expensive) inside-out indoor positioning system on the robot, for example, a sensor fusion between LIDARs + optical + IMU + odometer + sonars. Still, the cost of such an expensive robot’s positioning system would be lower than the cost of the warehouse’s IPS infrastructure.
However, the business case would drastically – by a factor of x2-200 times – improve cost per mobile object if, in the same indoor positioning system, other objects were tracked: more autonomous robots, forklifts, people, older AGVs, cranes, and semi-static assets. Incremental costs for each such mobile object would be approaching the cost of the mobile beacon (tag). That would make the RTLS case highly profitable and paying back time very short.
Another extreme – a very low portion of the infrastructure costs as compared to other costs:
– Just two stationary beacons cover an area for swarming robots
– 200 robots operating in the same submap
The ratio of infrastructure to mobile beacons costs would be nearly 1/100.
Note that the infrastructure cost is not only stationary beacons (anchors). It is also, among other things:
– Power supply
– Cables
– Wiring
– Mounting and other auxiliary materials
– Wireless and data transmission networks
– Special lighting, if needed
– Special QR codes, if needed
Cabling costs
Cabling for stationary beacons can be a substantial cost of the whole system. Pay attention to:
– Marvelmind Indoor “GPS” doesn’t need Ethernet or PoE
– Avoid systems requiring data connection – expensive
– If PoE is already available – it is good. Use PoE-to-USB converters
– Basic ~120/220V, or +5V USB, or +6-48V DC is less expensive
– Low voltage DC cabling significantly less expensive that ~110/220V
– US DC-DC converters and save costs
– Use basic USB converters and save cost

Special cabling, for example, required in explosion-hazardous areas may be so expensive that is better to use batteries. Batteries is not a perfect solution either, but it could be smaller of two evils.
Power supply costs
Power supply costs consists of:
– Cabling
– Power converters and connectors
– Batteries and their maintenance (replacement or charging)
– Cost of electricity
– Access cost to stationary beacons
Users shall clearly understand that the power supply costs of mobile beacons are typically inessential compared to the power supply costs of stationary beacons because mobile beacons are easier available, but stationary beacons can be placed high and practically non-accessible without special (expensive) permits and works.

An exception to this rule is when the IPS tracks hundreds and thousands of assets, such as palettes. You don’t want to charge the tags or replace the batteries on them all the time. But it is a particular case because the palettes are semi-mobile goods. They are typically labeled with QR/bar codes or passive RFID that don’t require batteries.
Focus your efforts on to optimize the costs of power supply of your stationary beacons – not mobile beacons.
Learn more: Power supply options for beacons.
Need for additional infrastructure
The major item of additional infrastructure to avoid is an additional data transmission network or cable for:
– Stationary beacons synchronization
– Location data transmission
– Commands and user data exchange between tags and system
The last item is particularly typical and shall be clearly answered:
– No, LoRa/WiFi/Bluetooth/ZigBee/LPwan is required
– Marvelmind already has its own license-free ISM radio in the system
– Some other RTLSs require WiFi for data transmission
– Some UWB RTLSs require expensive cabling for synchronization
– Some require LoRa for data/task transmissions to/from tags
Check and avoid these unnecessary costs of additional infrastructure.
It is possible to send user payload data from the mobile beacon to the system and from the system to the mobile beacon up to 50kbps. See more in the Marvelmind Robotics Indoor Positioning System location update rate and user data transfer rate table.
Cost of mobile beacons
There are cases, for example, swarm robotics, when the cost of mobile beacons may be the biggest contributor to the overall cost of the RTLS.
Another case with relatively high costs of mobile beacons is people tracking. But it also depends on the ratio: number of people/area. The infrastructure cost may prevail if the site is complex and requires many stationary beacons to provide the line of sight between the mobile beacons and two or more stationary beacons – the principle requirement for any precise indoor positioning system.

Modems and Multi-Modems
The modem is a central controller of the system. The modem can manage up to 250 beacons today (stationary and mobile combined).

Typical indoor positioning system has only one modem, because it is enough. There are a couple of situations, though, when it is not the case:
1) More than 250 beacons to handle
2) Radio coverage of of one modem is not enough
A typical indoor positioning system has only one modem because it is enough for real-life applications. There are a couple of potential exceptions:
1) More than 250 beacons required to handle
2) Radio coverage of one modem is not enough
The point 1) is relatively easy to handle. If you need more than 250 beacons, let us know and we will do software changes to increase the capacity.
The point 2) may have different origins and different solutions:
– Several floors – try using more advanced antenna-feeder system
– Large distance – use full-size antennas for modem and beacon
– Even larger distance – use directional high-gain antennas
– Tracking in more than one buildings – use independent systems
Only in case when you need to track a large area and mobile objects freely moving over the whole area and must be tracked everywhere and the methods above do not work, use the Multi-Modem Architecture.

The Multi-Modem Architecture adds layer of complexity:
– Instead of a map, you will have a super-map – a map of maps
– Instead of Modem or Super-Modem – Super-Super-Modem
– Super-Super-Modem doesn’t control beacons – it controls modems
– Super-Super-Modem can be just an SW on a computer
Since there is only one or a few modems, they typically contribute little to the overall cost of the system in Marvelmind Indoor “GPS”.
It doesn’t necessarily the case in other systems that may rely on “servers” or “servers SW” or “clouds”. For example, in some UWB or motion capture systems, the modem or its equivalent – a central processor – can be a significant cost contributor.
Marvelmind Indoor Positioning System is based on two key technologies:
1) Precise distance measurement based on ultrasound time of flight
2) Precise wireless time synchronization and data transfer
Thus, though people assume that Marvelmind Indoor “GPS” is an ultrasound-based indoor positioning system, reliable and real real-time wireless connectivity is as essential as ultrasound.
We developed our radio protocol from scratch because it is real real-time, unlike, for example, BLE or WiFi that, first of all, have millisecond-level or even tens of millisecond-level delays. Still, it also doesn’t guarantee a jitter, i.e., it doesn’t guarantee the required timing accuracy, which is on the microsecond-level in our case.
Having reliable radio is an absolute must because if there is no, then nothing works:
– No time synchronization between network elements
– Measured location is not received and sent
– All kinds of omissions and glitches in tracking
As discussed above, it is typically more practical and recommended to have a more advanced antenna and feeder system than to deploy a multi-modem architecture. Though, it depends on the details of the case.
Reliable radio connectivity is genuinely essential.
See more: Radio connectivity – essential hints.
Precise indoor positioning – planning phase – a basic questionnaire we share with potential customers before the project starts.
Precise indoor positioning – implementation phase – steps we do together with customers from the start till the full implementation.
Deployment cost totally depends on the system’s complexity and the area’s complexity. It depends less on the sheer number of network elements. For example, bringing more mobile beacons to the system doesn’t significantly contribute to the deployment cost.
The deployment costs can significantly contribute to the system’s overall costs. For some systems, it may be even higher than the cost of the hardware + software.
Notes:
– Starter Set – follow the Operating Manual and Unpacking video
– For the first real projects – let us do the remote deployment for you
– Learn by watching what we do. Deploy by yourself then, if you wish
In case of Marvelmind solutions, base SW is included in the cost beacons, modems, and starter sets. Check the SW licenses of other solutions you consider.
There are optional licenses that enrich the functionality. They are required only for special cases. Check whether you need them, for example:
Other vendors may have a completely different price structure. Thus, check the total costs – hardware + software. Check whether there is a subscription fee.
Marvelmind Robotics currently doesn’t use cloud solutions, and we don’t charge any usage or subscription fee.
Check this particularly carefully if buying other solutions because it may be your main part of the total cost of ownership.
Some of our optional software features are not perpetual. But all base software is already in the price of the beacons and modems. Thus, if you wish, you can purchase, use your system all the time, and forget about us. You don’t have to pay anything extra.
In order to prevent or minimize lost revenue, we recommend:
– Have a set of spare parts for very quick resolution
– Order Extended warranty
– Keep close contact with us and ask questions
We are always happy to help.
Since our equipment is used in innovative projects that often involve deep hacking, including hardware hacking, we don’t overcharge for the warranty costs on the products for those who don’t need them. Thus, the default warranty is one month.

However, if you deploy a more traditional indoor positioning system and want to be on the safe side, you can order an extended warranty.
See more in Warranty.
Costs of spare parts
When you get a reasonable size system deployed, we recommend to have spare parts. Ideally is to have at least one item of each type of the network element. For example: one additional Modem v5.1, if you have it in the network, one additional Super-Beacon of each frequency that you have it in the network, and so on.
With spares in hand, you can restore the system’s full functionality in a couple of minutes – you need to update the SW on the device to the same SW version you already have in the system and give the beacon the same address that the broken one had.
We can deliver the replacements in 3-5 working days for standard parts, such as Super-Beacons, Modem v5.1, etc. More rare products, for example, robots, outdoor products, or industrial variants, may have a lead time of up to several weeks if they are not in stock.
Thus, having spares simply saves you a lot of time and keeps your network up and running without delays.

Marvelmind equipment for indoor positioning systems rarely fails because there are few points of failure. Think about the network elements as WiFi access points. They work and work for years if nothing extraordinary happens. What can happen?
– All sorts of mechanical impacts is the most common problem
– Mechanically broken antennas and connectors
– Dropped beacons and broken transducers
More rare, but still possible:
– Killed by static electricity – connectors or antenna ports
– Killed by liquid
– Bloated battery
Some of this can be easily fixed: spare antennas and spare USB cables. Even with batteries, it is possible to restore functionality by cutting the battery entirely and powering from the external fixed USB power supply, as we typically recommend for permanent installations, or by using DC-DC converters if we talk about mobile beacons.
Robots, on the other hand, are different from indoor positioning systems. They have many moving parts, are very complex, wear and tear, move and may hit other objects, etc. Regarding spare parts, robots are in a league of their own.
Spares have the same costs as regular products.
Integration costs
Our external protocols are open and can be easily downloaded: Marvelmind open interfaces and protocols (PDF)
Thus, it is very easy to integrate, because everything is transparent.
Moreover, we have published ready-to-use code samples (C, Python, Arduino, etc.) that can be used for integration with the system. Thus, simplifying the integration even further.


Can we do an integration with your protocol or interface? – yes, we can, and we have done. For example, we integrated with u-Blox proprietary GPS protocol and simulated the u-Blox compass and its I2C data with our Paired Beacon. Thus, PixHawk thinks it is u-Blox GPS connected while, in fact, it is Marvelmind Indoor “GPS” connected with the Paired Beacons configuration giving precise location and direction indoors.
SW and HW customization costs
Typically, customers love our system and are very enthusiastic about it. They very often come up with new ideas, like:
– “Oh! We love it, but we also want to get this and this. Can you do it?”
– “We want an additional SW feature”
– “We want Belt, and the robot follows a person with the Belt”
– “We want Robot v100, but with HW customization. Can you do it?”
Yes, we do all sorts of customizations – hardware and software – all the time. The majority of optional features were originally requested by customers, for example.
Send us your request to info@marvelmind.com, and we will share the development cost and lead time with you.