如上所述,首先需要决定的是您是否需要基于配对信标的方向。如果需要,则每架无人机需要两个移动信标。如果不需要,每架无人机只需一个移动信标。
使用单个移动信标飞行是可能的,但自动驾驶仪上的软件必须更复杂——并非开箱即用,因为它需要在飞行过程中提供方向并纠正无人机陀螺仪的漂移。这很复杂,可以实现,但很复杂。如果可能的话,我们始终推荐配对信标配置,作为室内方向的简便解决方案,即使在静态状态下也是如此。
然而,如上所述,对于蜂群无人机或室内无人机表演,这可能不是最佳选择。因此,我们将采用一个更复杂且更脆弱的方案,以单个移动信标作为无人机的主要配置。
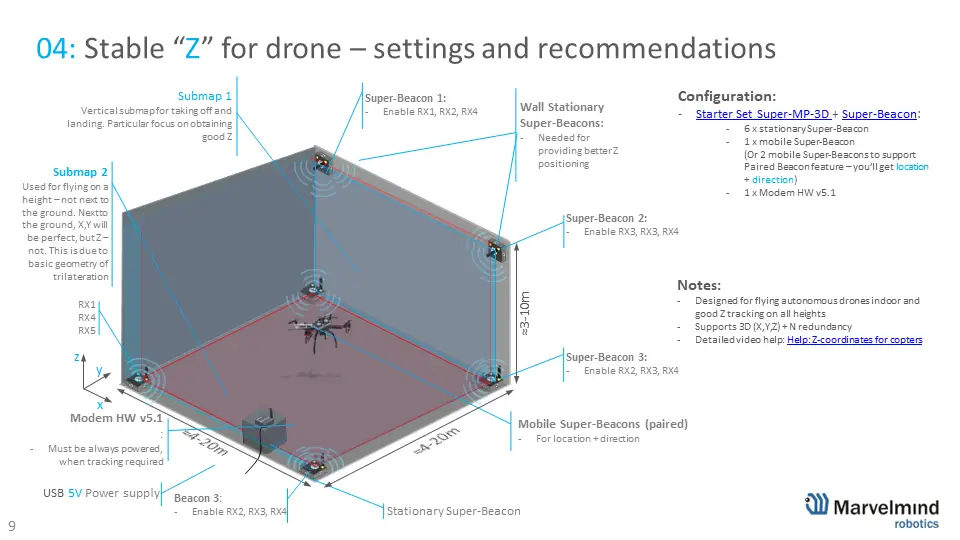
配置:


{kind=link}