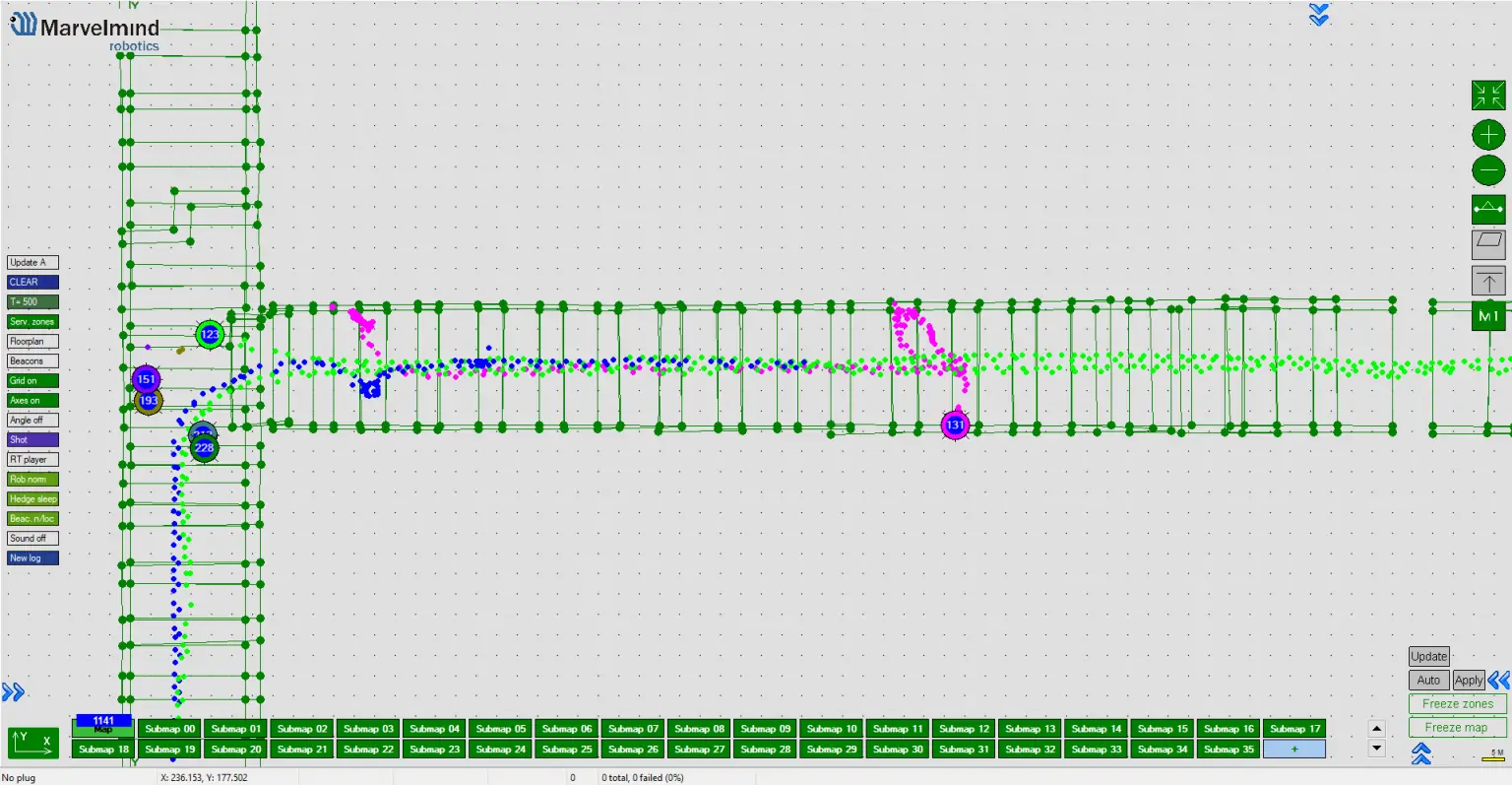
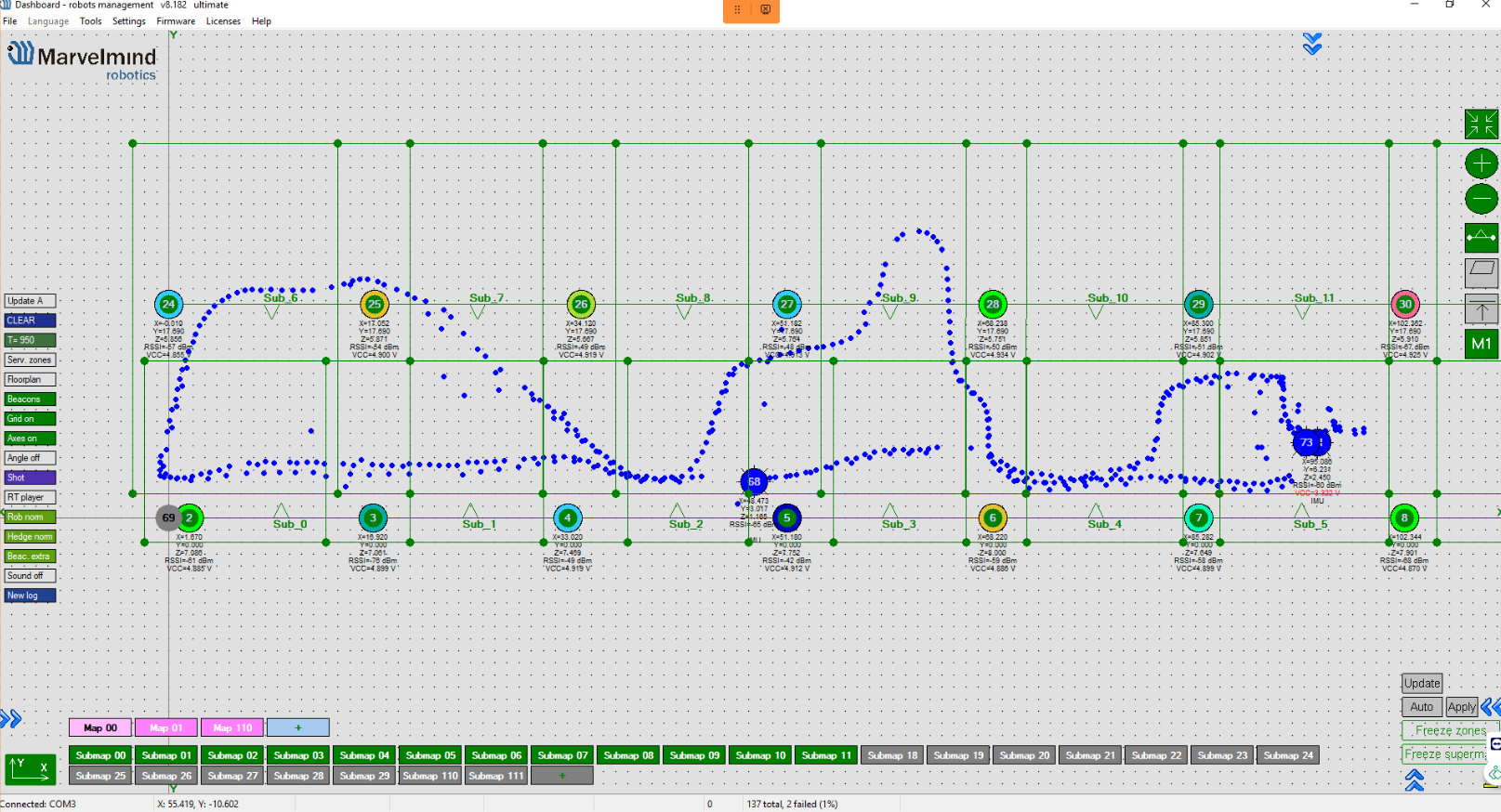
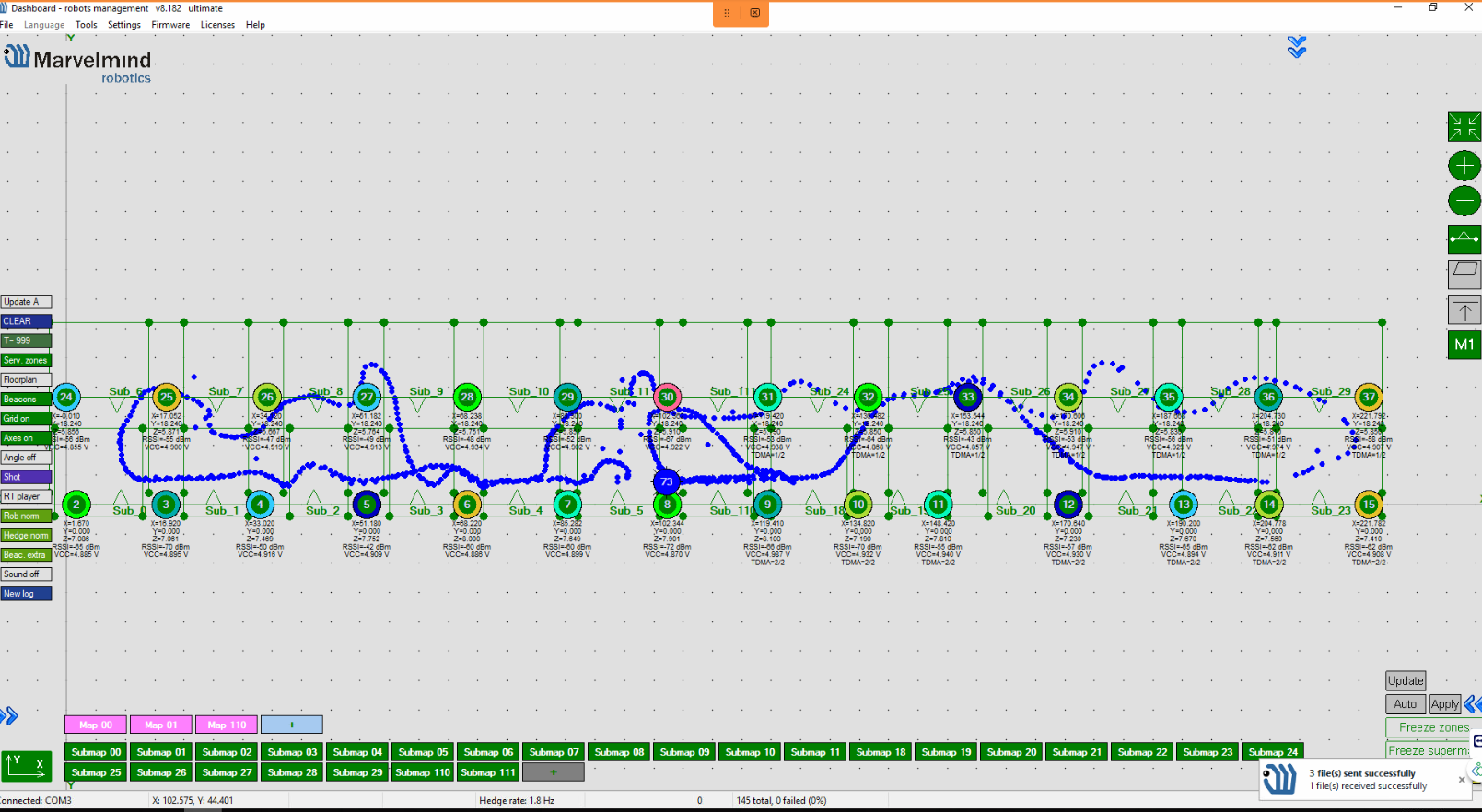
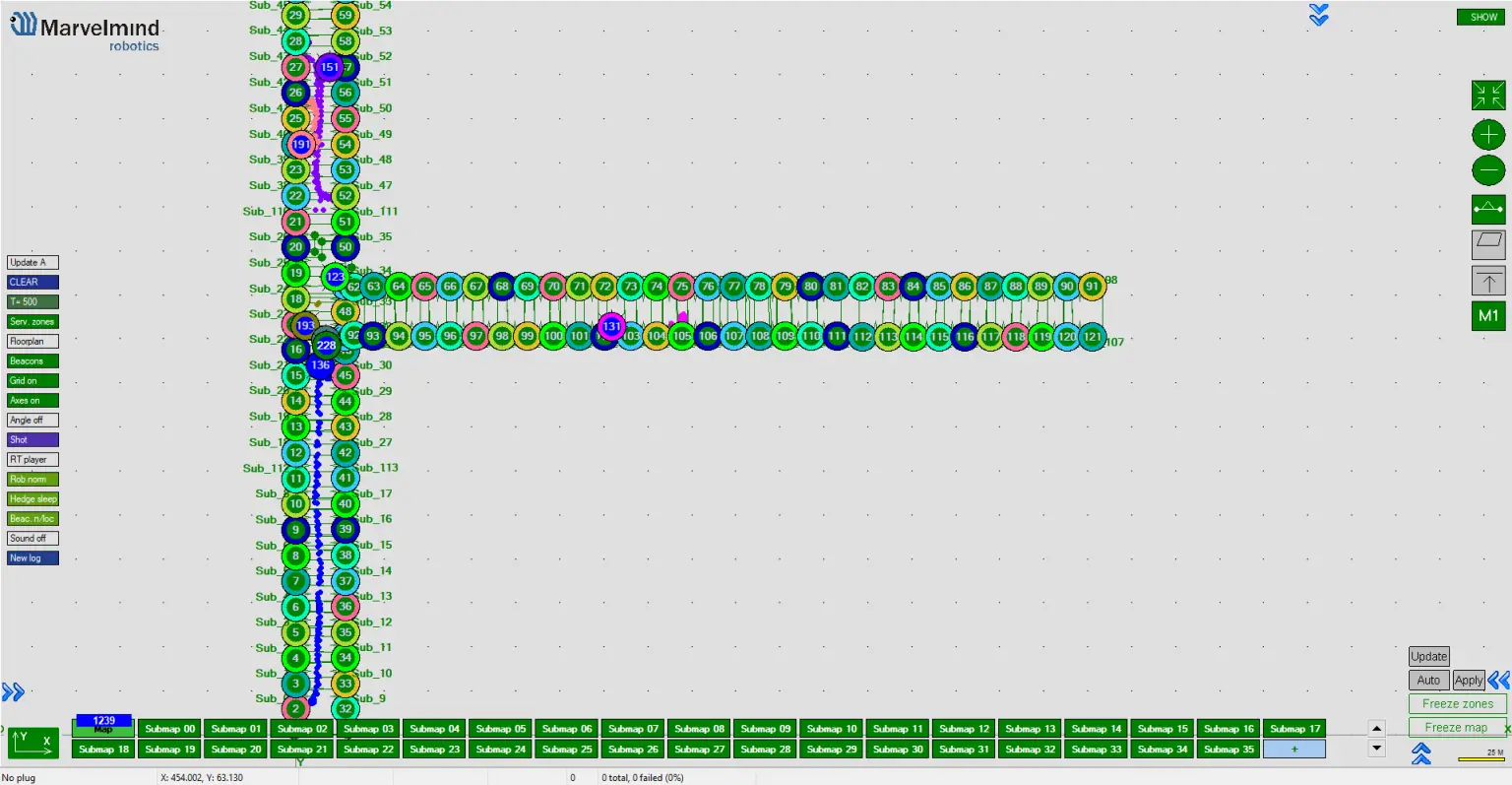
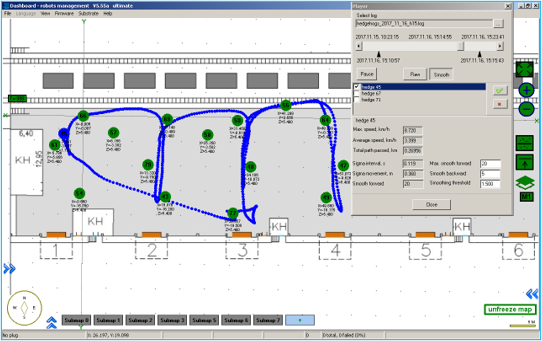
Home叉车室内定位系统 – 仓库AGV叉车追踪解决方案 | Marvelmind 🇨🇳 更多中文页面:关于我们 机器人定位 无人机定位 DJI无人机 人员 付款方式 配送信息 技术详解 叉车精确室内定位系统 为什么要追踪叉车? 追踪叉车、手推车、AGV及其他车辆对于多种用途非常重要:安全:防止碰撞、事故、车辆或货物损坏;或获取数据以便事后分析生产效率:根据位置分配任务,了解行驶路线并优化驾驶监控:接收来自车辆的数据(遥测);向车辆发送数据(任务)或完全停止车辆(电子围栏、紧急情况) 关于叉车和车辆精确室内追踪的其他资料 叉车追踪与监控如何选择固定信标的安装高度 Marvelmind 室内定位系统能为您做什么 Marvelmind 室内定位系统针对叉车和车辆的部分核心功能:对叉车进行精确(±2cm)室内定位,从而优化其使用效率通过室外版或工业版信标实现精确室外定位静态电子围栏区域移动电子围栏区域,例如在您的移动车辆周围设置围栏,以提醒驾驶员和行人使用我们的内置无线电及开放接口和协议,从车辆发送遥测数据和指令(电池电压、工具位置、仪表读数等)使用我们的内置无线电及相同的开放接口和协议,向车辆发送数据和指令(开关控制、航点、控制命令等) 典型实时追踪数据 用户可获取多种实时追踪数据。部分关键信息如下:每台叉车的位置数据更新频率为 1-10 Hz(每秒更新 1-10 次)追踪精度 ±2cm数据流中包含电子围栏违规提醒所有流式数据均记录在本地 CSV 文件中,供您进行后处理开放 API,可通过您的图形界面控制系统数据不会离开您的场所。无需云端。所有计算均在本地完成。非常安全下方追踪截图中的不同颜色点,代表仓库货源设施中 6 台叉车同时行驶的轨迹。带数字的圆圈代表不同的叉车。 以下示例展示了一种多 Modem 架构,将三张地图(Map 00、01、110)合并为一张超级地图。该架构可覆盖任意大面积区域(数十万平方米乃至更大),支持在同一或多个建筑物乃至更大范围内部署数百乃至数千个信标(固定式和移动式)。 两条轨迹均采集于全远程网络部署过程中。 数字孪生与可视化选项 Dashboard 的截图展示了使用我们默认工具设置和监控系统时的界面示例,这些工具可立即下载。它们实用、高效,足以满足众多用户的需求。但是,如果您需要更高级、更精美的解决方案——例如 3D 可视化(基于 Unity 或类 Unity)、数字孪生及类似的创新数据可视化方案——可根据需求提供。我们的合作伙伴专注于数字孪生和 3D 可视化,并已将我们的精确室内定位系统集成到其可视化工具中。 开放协议与接口。 您可以轻松将自己的图形界面与我们的系统配合使用。用于从您的图形界面控制我们系统的 API 是开放的,可直接下载。在接口和协议层面的便捷集成同样如此——开放协议与接口。请注意,您不仅可以获取移动信标和调制解调器的位置数据及 IMU 数据,还可以通过我们的调制解调器向信标发送额外的用户数据——即您自己系统的数据,再从信标传输至您的叉车。反方向传输同样可行。 叉车及其他车辆的推荐配置 通常会立即产生以下问题:我们应使用哪些设备?覆盖一个仓库需要多少个信标? 推荐设备 选择设备时需回答以下几个基本问题:仅室内使用还是同时用于室外?防护等级要求?整体机械坚固性要求?安装方式固定式还是移动式?无线连接方式、通信距离、天线配置?供电选项?交流还是直流?您计划追踪多少个移动信标/叉车?这将决定架构选型,而架构将决定信标类型 覆盖仓库需要多少个信标? 答案取决于以下因素:仓库的复杂程度:开阔区域所需信标数量比密集货架通道区域少 2-6 倍仓库面积您希望系统配置得多密集?信标布置越密集,覆盖效果越好,但也更容易受到干扰您希望追踪多少个移动目标?目标物体类型?仅限叉车,还是还包括人员、AGV、机器人、无人机、车辆、起重机?您是否需要 2D 追踪,还是同时需要 3D 追踪(例如货叉本身,而不仅仅是叉车)? 这些问题相对简单,此处有更详细的说明:网络规划与实施。 例如,对于一个面积较大但结构简单的 450x450m 开放式仓库,实际部署配置包含 123 个固定式 Super-Beacon。 仅限室内使用时,推荐选用 Starter Set Super-MP-3D 总体而言,当您不确定选择哪种方案或将进行哪些具体实验,但又希望获得最简便、灵活性最强且性能最优的解决方案时,这是最佳也是最稳妥的选择。配置:https://marvelmind.com/product/starter-set-super-mp-3d/ – 主套装。对于初步实验可能已经足够。之后,您可以添加额外的 Super-Beacon 进行扩展https://marvelmind.com/product/super-beacon/ – 用于扩展的额外移动或固定信标。在 Dashboard 中单击即可切换模式。 室内外兼用:Super-Beacon-Outdoor + Modem-Outdoor 最简便且推荐的配置由 Super-Beacon-Outdoor 和 Modem-Outdoor 组成。最经济实惠的配置:2 x Super-Beacon-Outdoor 作为固定信标1 x Super-Beacon-Outdoor 作为移动信标(与固定信标为同款,切换至移动模式)1 x Modem v5.1您将在一个子地图中以最大距离实现 2D 追踪。 工业室内外环境使用:Industrial Super-Beacon + Super-Modem 当您需要在室内外环境中运行、在零度以下温度工作(工业版信标不含嵌入式电池,避免低温失效),或需要 RS485 或 CAN 等工业级连接时,推荐使用 Industrial Super-Beacon 和 Super-Modem。推荐最小配置:2 x Industrial Super-Beacon-Plastic 作为固定信标(例如 19kHz 和 31kHz)1 x Industrial Super-Beacon-Plastic 作为移动信标1 x Modem v5.1-Outdoor 其他需要注意的重要事项 Modem v5.1 与 Super-Modem 的比较 Super-Modem 无疑更为强大,具备工业级接口(RS485),防护性能也优于 Modem v5.1。Super-Modem 甚至内置了 WiFi。然而,Super-Modem 使用起来较为复杂:WiFi 设置可能会让您感到困惑Super-Modem 不使用普通 USB,而是采用专用的 USB 转 7pin IP67 连接器因此,特别是在初期阶段,我们建议使用 Modem v5.1-Outdoor 而非 Super-Modem。待您更加熟悉后,再轻松切换至 Super-Modem。 默认天线与全尺寸天线的比较 工业环境通常对无线电传播不友好:多处金属墙体或结构(货架等),导致严重的多径传播,无线电信号强度出现极深的衰落点传输距离长,可达数百米乃至更远来自多个其他来源的潜在干扰因此,我们建议使用全尺寸天线。它们虽无法完全解决无线电问题,但可将出现问题的概率降至最低。在某些情况下,可建议在调制解调器侧或远端信标上使用专用定向天线。对于覆盖范围更大的场景,我们推荐采用多 Modem 配置。每个 Super-Modem 负责其对应的地图,并将数据发送至一个超级 Super-Modem,由其将各地图合并为一张超级地图,终端用户看到的是一张无缝拼接的地图。有关多 Modem 配置的更多信息,请参阅产品介绍。 使用 Marvelmind 室内"GPS"精确追踪室内叉车 以下是叉车在仓库中移动轨迹的示例:开放式仓库绿色点——安装在天花板上的固定信标位置,信标间距约为 10-15 米,布置方式经过优化,以最佳方式覆盖每个出入口蓝色轨迹——叉车在数分钟内记录的行驶轨迹右侧小窗口——基础统计分析,如平均速度、最高速度、行驶距离等平面图可轻松上传至 Dashboard 上图展示了轨迹在我们 Dashboard 中的显示效果。但客户通常会将我们的位置数据集成到自己的图形用户界面(GUI)或仓库管理系统(WMS)中。使用现有 API 即可轻松实现这一集成。使用 Super-Modem 作为调制解调器时则更为简便。位置数据通过 UDP 经 WiFi 以流式传输至您在全球任意位置的固定 IP 地址,然后使用我们的开放协议读取数据,并在您的 WMS 或 GUI 中显示。 车辆精确室内定位示例 在 5000 英里之外对 10 台叉车进行精确(±2cm)追踪 配置: 仓库(660英尺×60英尺)10 台叉车,每台叉车配备一个带全向麦克风的 Super-Beacon14 个固定式 Super-Beacon,覆盖整个仓库1 x Modem v5.1 作为中央控制器——逆向架构(IA),采用全重叠 TDMA 子地图通过 TeamViewer 进行全远程部署