如何在室内自主飞行DJI无人机?

如何快速实现您的DJI无人机在室内自主飞行:
- 获取一架受DJI Mobile SDK v5支持的无人机
- 获取遥控器DJI RC N1(经Marvelmind测试)或DJI RC N2(经我们一位客户测试)
- 列表中的其他无人机和遥控器也应受支持,但尚未经过实际测试
- 获取Android 10或更新版本的手机
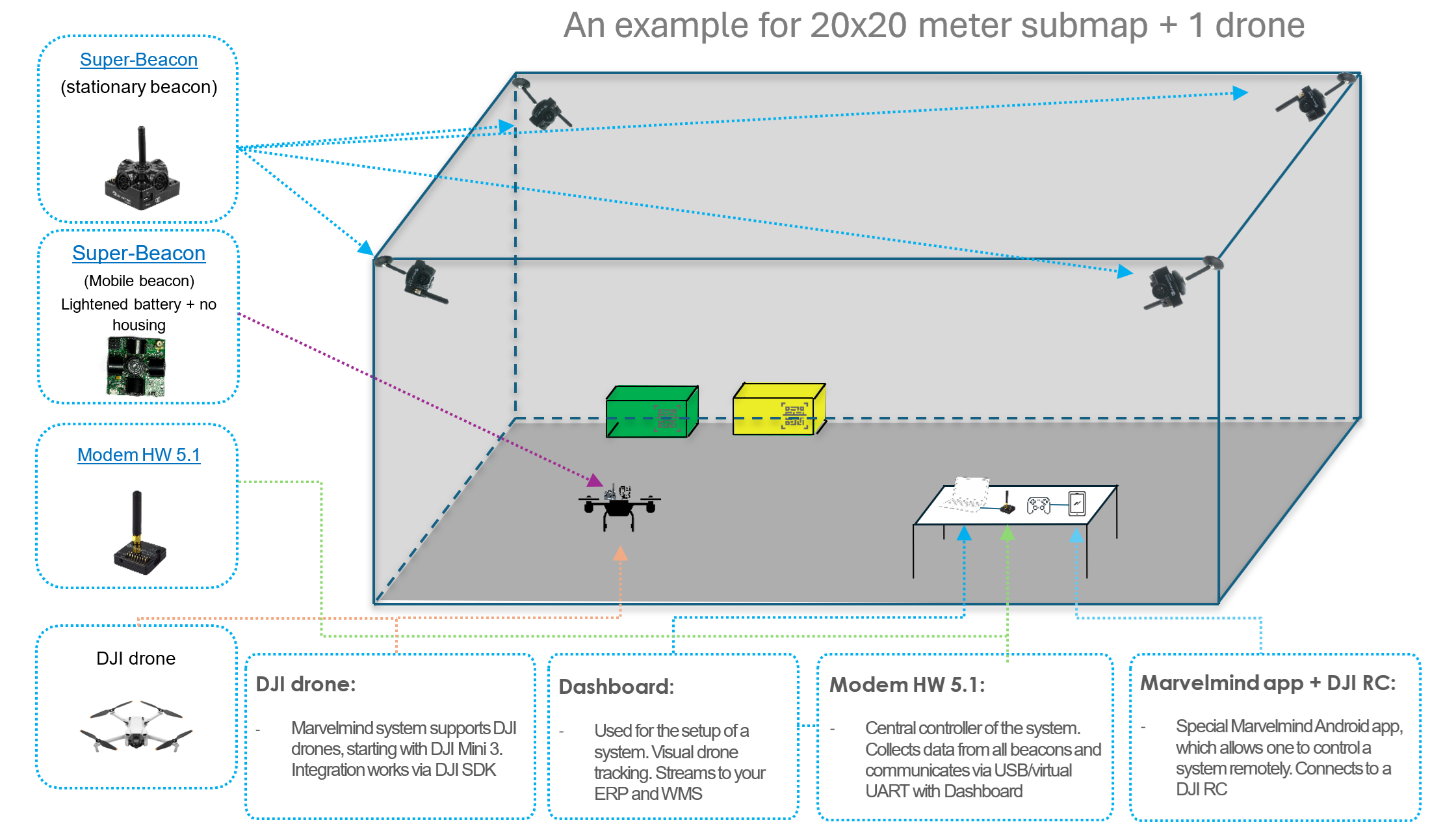
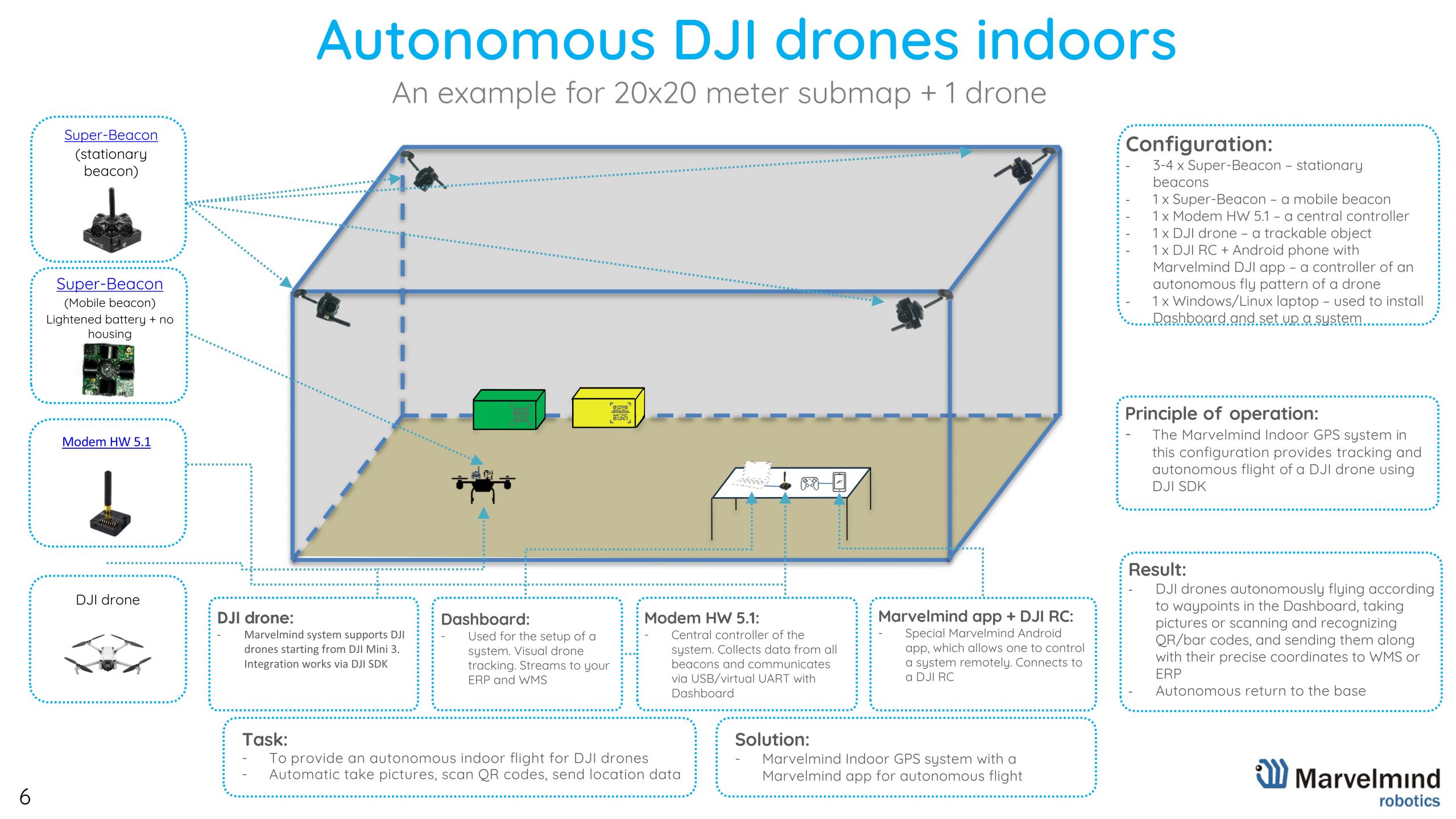
- 获取3至4个Super-Beacon(配合磁性支架)作为固定信标
- 获取1至2个Super-Beacon作为移动信标。如果使用小型无人机,可为其减重以延长飞行时间:更换更小的电池、拆除外壳等
- 获取1个Modem v5.1作为中央控制器
- 下载、安装并使用Marvelmind DJI SW软件包,在电脑上安装Dashboard,在手机上安装Marvelmind DJI应用
- 获取MMSW0019:DJI室内自主飞行支持许可证,并为您的调制解调器CPU ID向我们注册
- 按照Marvelmind DJI自主飞行手册操作
- 享受自主飞行 🙂
更新于2025年10月27日:
- 最新Marvelmind DJI软件包:marvelmind_DJI_SW.zip – 又一次更新,包含多项小改进和错误修复
更新于2025年7月30日:
- 最新Marvelmind DJI软件包:marvelmind_DJI_SW.zip – 链接始终相同,但包含新版本软件
- 多项小改动和改进
更新于2025年5月25日:
- 最新Marvelmind DJI SW(marvelmind_DJI_SW_v8_220_2025_05_22_release.zip)支持Android MSDK v5。立即下载。您可以飞行DJI Mini 4 Pro等多款无人机
- 我们的一位客户已成功使用新版软件配合DJI RC N2进行测试
更新于2025年3月30日:
- DJI更新了SDK。现在(终于!),他们也支持DJI Mini 4 Pro以及其他一些不错的变化。查看更多:https://developer.dji.com/doc/mobile-sdk-tutorial/en/:
请注意,我们尚未升级至MSDK v5.13.0,待有强烈的客户需求时我们将进行升级。因此,如果您计划飞行Mini 4 Pro或新支持列表中的其他无人机,请通过info@marvelmind.com告知我们,我们将迁移至新版SDK。但需要您在迁移前完成购买。
- DJI 与 Pixhawk/ArduPilot/PX4 对比 – 选择最适合您需求的无人机平台
更新于2025年3月1日:
我们几乎每周都会更新Marvelmind DJI SW软件包:
- 下载、安装并使用最新的Marvelmind DJI SW软件包。在您的电脑上安装Dashboard,并在与DJI RC-N1配对的Android手机上安装Marvelmind DJI应用
更新于2025年1月9日:
如何快速实现您的DJI无人机在室内自主飞行:
- 获取一架受DJI Mobile SDK v5支持的无人机
- 获取遥控器DJI RC-N1
- 获取Android 10或更新版本的手机
- 获取3至4个Super-Beacon(配合磁性支架)作为固定信标
- 获取1至2个Super-Beacon作为移动信标。如果使用小型无人机,可为其减重以延长飞行时间:更换更小的电池、拆除外壳等
- 获取1个Modem v5.1作为中央控制器
- 下载、安装并使用Marvelmind DJI SW软件包,安装Dashboard和Marvelmind DJI应用
- 获取MMSW0019:DJI室内自主飞行支持许可证,并为您的调制解调器CPU ID向我们注册
- 按照Marvelmind DJI自主飞行手册操作
- 享受自主飞行 🙂
更新于2024年8月1日:
- 我们现在可以在室内飞行DJI无人机了。因此,下文中的部分信息已过时
- 我们的应用使用DJI SDK远程控制无人机,并利用来自移动信标的位置数据实现完全自主的航点飞行。例如,将Super-Beacon(配备较轻的100 mAh电池)或Mini-TX安装在无人机上,方式与下方旧款DJI无人机视频类似
- 该方案尚未正式商用,但我们正在寻找试点用户。请发送消息至info@marvelmind.com了解更多详情
- 已在DJI Mini 3和DJI Mini 3 Pro上测试。同类及更新型号的无人机应同样适用
- 更高端的无人机(例如Matrice系列)应支持同一技术。可能需要针对其他SDK进行软件适配——尚未验证
2024年8月1日之前的较旧(部分已过时)信息:
在室内追踪DJI无人机非常容易。然而,让DJI无人机在室内自主飞行则是一项较为复杂的任务。
本文仅聚焦于DJI无人机,因为它们有其特殊性。如果您希望了解更多关于室内自主无人机的一般信息,请查看我们的无人机主页。
DJI无人机的问题
封闭生态系统:
- DJI与苹果公司类似,构建了一套”围墙花园”式体系——要么全盘接受,要么放弃。非DJI设备难以或无法连接至DJI无人机
- DJI Mavic或DJI Phantom等消费级无人机没有外部GPS输入接口,因此无法轻松连接外部GPS源或如Marvelmind室内”GPS”这样的室内RTLS源
- 更昂贵的DJI无人机(如Matrice系列)具有外部GPS输入接口,但这些接口是为DJI GPS追踪器设计的,即尚不清楚相关协议是否公开或可商业使用
并非为室内自主飞行而设计:
- DJI无人机内置磁力计/罗盘,适合室外使用,但在室内表现极差。室内周围总是存在金属和产生磁场的电流,会干扰地球磁场。因此,无人机往往难以起飞,因为它无法完成罗盘校准
- 罗盘难以或无法禁用
DJI无人机的基本室内追踪很简单
在室内追踪DJI无人机或任何无人机都很简单:
- 使用Marvelmind室内”GPS”,例如Starter Set Super-MP
- 在房间内安装固定信标,确保信标之间视线通畅,间距不超过30米
- 在无人机上安装一个移动信标
- 系统约10秒内即可运行
- 以手动模式飞行无人机
- 享受精确的轨迹追踪
请参阅下方室内和室外追踪示例。这两种场景在技术和方法上没有区别——完全相同。我们只是展示该系统可在室内和室外使用,且两种情况下均无需依赖GPS。
DJI无人机室内飞行的潜在解决方案
借助DJI开发者SDK,或许可以实现DJI无人机在室内自主飞行。有未经证实的信息表明,可以通过以下方式使用DJI无人机:
- DJI无人机(或任意无人机)携带一个或两个移动信标(若需要位置+方向信息)
- 系统确定移动信标(及其所在无人机)的位置
- 位置数据被输入外部计算机或自动驾驶仪,该系统知晓所需航点及无人机当前位置
- 自动驾驶仪的控制信号通过DJI SDK回传至无人机,即无人机认为自己由人通过SDK控制,而实际上它是自动飞行的
这种方案是可行的。很早之前,我们曾用另一款基础无人机实现过类似方案:
请注意,我们并非用DJI,而是用另一款基础无人机完成了这项测试,但方案非常相似。无人机甚至不知道自己是被自动控制的,它以为自己是由操作员手动控制的。
让DJI无人机在室内自主飞行的其他方案
破解内部GPS协议:
- 可以对硬件和内部GPS协议进行破解,将数据直接注入无人机内部。无人机将无法分辨收到的数据是来自真实GPS还是Marvelmind室内”GPS”。有未经证实的信息表明,此类破解并不太难实现,相关协议也是可获取的
破解遥控器:
- 可以对DJI无人机遥控器进行物理破解。这样一来,用手指手动控制的方式将被替换为来自数模转换器的电压信号输入,该转换器与外部控制系统相连。通过这种方式,无人机甚至遥控器都不会知道自己正在被人类控制。外部自动驾驶仪将根据移动信标提供的坐标,在各航点之间驾驶无人机飞行,而无人机内部控制系统则维持稳定飞行姿态——两全其美
室内自主飞行的DJI替代方案
基于Pixhawk及类似平台搭建无人机:
- 这是最经过验证、最可靠的解决方案
- 硬件和软件方案繁多:不同厂商提供多种Pixhawk硬件版本
- 多个软件平台:PX4与ArduPilot。设置繁杂,极易迷失或混淆
- 输入、设置等方面几乎完全灵活。由于大部分软件开源,甚至可以编辑源代码
- 适合中高级用户
- Marvelmind已测试并支持多种配置,最新测试为:PX4 + Pixhawk 4:https://youtu.be/52e6eTZapJ8
与其他类型无人机集成:
- https://dronehub.ai
- https://www.parrot.com/en
- https://us.yuneec.com/
- https://freeflysystems.com/
- https://skyfish.ai/
- https://percepto.co/
- https://www.skydio.com/
- https://www.autelrobotics.com/
- https://www.symatoys.com/
- https://www.hubsan.com
- https://draganfly.com/
- https://www.flyability.com/
这些及类似无人机在开放性方面可能优于DJI无人机。可以使用它们,并借助Marvelmind室内”GPS”代替GPS,将其适配用于室内自主飞行。