Sistema di Posizionamento Indoor Preciso per Droni Autonomi
Spieghiamo come progettare e costruire droni autonomi per interni e quali sistemi di posizionamento indoor utilizzare per tracciare i droni in ambienti chiusi quando non sono autonomi.
Sebbene ci concentriamo sui droni per interni e sulla navigazione autonoma indoor, il sistema di posizionamento per droni funziona perfettamente anche all’aperto.
Per droni basati su Pixhawk/ArduPilot/PX4, si prega di utilizzare il seguente link.


Per i droni DJI in ambienti chiusi, è disponibile una pagina dedicata: Come far volare un drone DJI in modo autonomo al chiuso?
Leggi qui per scoprire come scegliere tra DJI e Pixhawk.
Altre risorse Marvelmind correlate ai droni
- Successo cliente: Volo autonomo di drone indoor basato su PixHawk + ArduPilot
- Alimentazione dei beacon con alimentatore esterno
- Sistema di posizionamento indoor per gare di droni
- Quanti beacon fissi servono per coprire lo spazio ufficio con un drone da pattugliamento indoor autonomo?
- Utilizzo di IA per droni
- Tracciamento DJI indoor: edizione a due stanze
- Tracciamento XYZ preciso per sciami di droni indoor e spettacoli di droni indoor
- Piattaforma di atterraggio autonoma per droni
- Degrado della precisione nei sistemi di posizionamento indoor e come evitarlo
- Guida: PixHawk + PX4 + Beacon Abbinati per Posizione + Direzione al posto dei magnetometri
- Guida: Volo di droni autonomi per ispezione in un magazzino
- Tracciamento di micro-drone indoor su lunga distanza
- Tracciamento di micro-drone con Real-time Player attivato
- Tracciamento di micro-drone con Real-time Player disattivato
- Tracciamento indoor preciso (±2 cm) in XYZ senza GPS/GLONASS
- Tracciamento preciso (±2 cm) di droni outdoor senza GPS/GLONASS – volo orizzontale su due livelli
- Volo completamente autonomo indoor
- Guida: posizionamento del beacon mobile sul copter
- Guida: coordinate Z per copter – spiegazione dettagliata
- Copter tracciato all’aperto con precisione di pochi centimetri
RTLS indoor consigliato per droni - suggerimenti rapidi
Se sei nuovo al sistema Marvelmind Indoor “GPS” e non sei sicuro di cosa scegliere, acquista lo Starter Set Super-MP, dove MP sta per multi-purpose (uso generico): sarà la scelta più sicura.
Per maggiori dettagli, consulta le opzioni consigliate di seguito.
In assoluto la scelta migliore e più sicura quando non si è certi di cosa scegliere o quali esperimenti si eseguiranno, ma si desidera avere contemporaneamente la massima flessibilità e prestazioni.
È la scelta migliore quando è necessario collegarsi a PixHawk, poiché sul Super-Beacon sono già disponibili due pin per la connessione a PixHawk. Scopri di più.
Configurazione:
– https://marvelmind.com/product/starter-set-super-mp-3d/
– https://marvelmind.com/product/super-beacon/ – un beacon mobile aggiuntivo per la configurazione Beacon Abbinati per avere sia posizione che direzione. Scopri di più sulla demo dei Beacon Abbinati
Il set è progettato per micro-droni (<100g) poiché il beacon mobile Mini-TX è piccolo e leggero. Il Mini-TX può coprire fino a 15-20m di distanza dai beacon fissi, sufficiente per la maggior parte dei casi reali. Il set può essere utilizzato anche per droni più grandi, ma la portata ultrasonica del Mini-TX è inferiore a quella dei Super-Beacon. Quindi, se il peso non è particolarmente critico, la scelta migliore è utilizzare i Super-Beacon come beacon mobili. Solo quando il peso è davvero l’unica preoccupazione, il Mini-TX è insuperabile.
Il Mini-TX è eccellente per il tracciamento. La nuova versione Mini-TX-2 è ideale anche per la connessione a PixHawk grazie a un connettore speciale a 6 pin con due pin dedicati alla connettività PixHawk (TX + GND) – simile a quelli del Super-Beacon. Si noti che i vecchi Mini-TX – consegnati nel 2022 e precedenti – non avevano il connettore a 6 pin sul fondo.
Configurazione:
– https://marvelmind.com/product/starter-set-nia-03-smalldrone
Una versione avanzata dell’opzione “Starter Set Super-MP-3D + Super-Beacon – Posizione+Direzione sul drone”.
Il Precise-Z, che fisicamente è composto da 2 beacon fissi aggiuntivi, offre la possibilità di avere coordinate Z precise in tutti gli intervalli di Z.
Scopri di più:
– Manuale di Posizionamento – sezione Precise-Z
– Spiegazione video sulla coordinata Z e il posizionamento dei beacon
Configurazione:
– https://marvelmind.com/product/starter-set-super-mp-3d/
– https://marvelmind.com/product/super-beacon/ – un beacon mobile aggiuntivo per la configurazione Beacon Abbinati per avere sia posizione che direzione. Scopri di più sulla demo dei Beacon Abbinati
– https://marvelmind.com/product/super-beacon/ – beacon fissi aggiuntivi per la funzione Precise-Z

Utilizzo di Marvelmind Indoor "GPS" per droni e quadricotteri
Il sistema di posizionamento indoor Marvelmind o Marvelmind Indoor “GPS” è ampiamente utilizzato per droni o quadricotteri in molti modi diversi:
- Guida di droni autonomi per interni ed esterni. Droni per esterni – guida per “l’ultimo miglio”, che può essere di centinaia di metri se necessario, ma la distanza massima dal beacon mobile sul drone a tre o più beacon fissi che servono il beacon mobile non deve superare
- Tracciamento di droni indoor
- Atterraggio automatico indoor e outdoor di droni atterraggio di droni o assistenza all’atterraggio di droni
- Ispezione di magazzini con droni autonomi indoor
- Spettacoli di droni


Peso e dimensioni sono i principali vincoli per i droni di piccole dimensioni
Il sistema di posizionamento indoor per un piccolo drone non è significativamente diverso dagli altri sistemi di posizionamento indoor, come quelli utilizzati per droni più grandi o altri sistemi di posizionamento indoor 3D (XYZ).
L’unica particolarità è il peso del beacon mobile (tag) installato sul drone. Il problema viene risolto utilizzando una versione alleggerita del Mini-TX, che prevede la rimozione della scocca, la rimozione della batteria o la sua sostituzione con una batteria molto leggera.
Inoltre, i droni più piccoli sono spesso essenziali: privi, ad esempio, di un computer di bordo o di un autopilota come Pixhawk e modelli simili. Tutta l’intelligenza proviene dalla stazione a terra. Esistono tuttavia delle eccezioni.

{kind=link}
Gli sciami di droni e gli spettacoli di droni possono includere decine o addirittura centinaia di droni. Quando volano all’aperto, il GPS RTK funziona molto bene. Ma il GPS RTK non funziona in ambienti chiusi.
Un tipico sistema di posizionamento indoor per droni si baserebbe su NIA – un beacon mobile in NIA emette ultrasuoni. Tuttavia, in questo caso, il numero pratico di droni supportati sarebbe 1-8, poiché con NIA la frequenza di aggiornamento della posizione per drone diminuisce proporzionalmente al numero di droni.
IA deve essere utilizzato se lo sciame di droni indoor è composto da decine di droni. Tuttavia, in IA il beacon mobile è in ascolto degli ultrasuoni; pertanto, devono essere adottate soluzioni speciali per contrastare il rumore delle eliche e garantire il corretto funzionamento del sistema. Scopri di più sulla soluzione.
Riceviamo settimanalmente richieste di droni autonomi o sistemi di posizionamento indoor per droni autonomi da interno, principalmente per l’ispezione di magazzini, la scansione automatizzata di codici a barre o la lettura RFID.
Esiste indubbiamente una solida necessità per questo compito e un forte interesse nel realizzarlo tramite droni.
Costruire un tale sistema per applicazioni reali è un compito complesso ma realizzabile. Discutiamo i dettagli dell’implementazione.

La fragilità della soluzione è la preoccupazione pratica più significativa. Esistono tuttavia soluzioni e persino valide alternative robuste.
Marvelmind Indoor "GPS" supporta PixHawk con ArduPilot e PX4
Marvelmind Indoor “GPS” supporta sia PixHawk con ArduPilot che PX4:
- Marvelmind e ArduPilot – link ad ArduPilot.org
- Manuale di Integrazione Marvelmind e PX4 – guida passo-passo con impostazioni e screenshot per Mission Planner, PixHawk e la connettività hardware
- Manuale di Integrazione PixHawk e Marvelmind – guida passo-passo per l’integrazione di PixHawk, ArduPilot e Marvelmind per droni
Marvelmind e PixHawk
L’utilizzo della combinazione di Marvelmind Indoor “GPS” e PixHawk è il modo più semplice e rapido per volare in autonomia al chiuso.

Costruire correttamente un sistema di posizionamento indoor per quadricotteri
Esistono alcuni aspetti, piuttosto semplici, da tenere in considerazione per volare con successo in ambienti chiusi:
- Manuale delle impostazioni per copter autonomi – raccomandazioni di base e pratiche per la configurazione del sistema Indoor “GPS” per l’utilizzo con copter/droni autonomi indoor e outdoor
- Manuale di Posizionamento – consigli pratici ed esempi su come installare il sistema Marvelmind Indoor “GPS” per ottenere le migliori prestazioni in diverse applicazioni e configurazioni
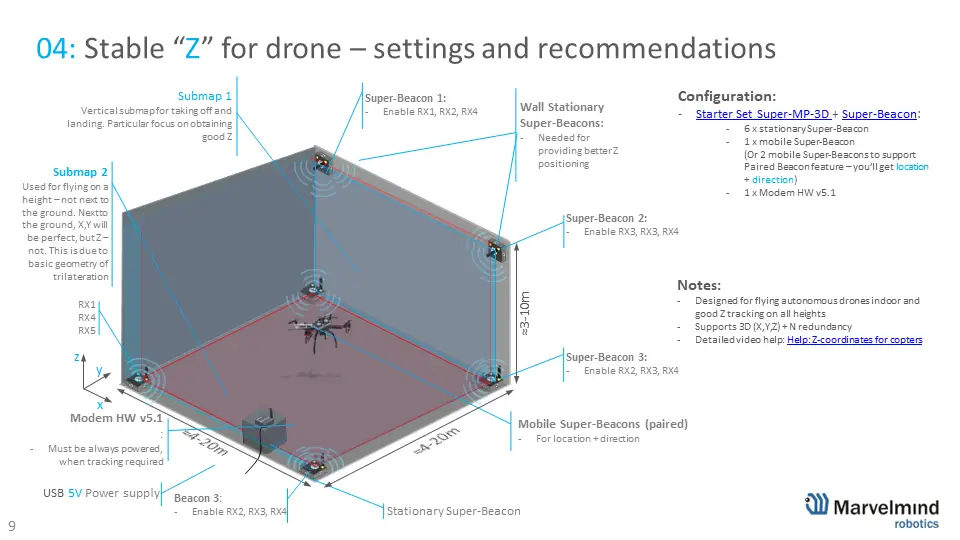
- Guida: coordinate Z per copter – spiegazione dettagliata – video YouTube che spiega come posizionare correttamente i beacon fissi per ottenere una buona precisione in Z. Se non è possibile seguire i consigli perché l’ambiente non consente di utilizzare la configurazione Precise Z con 4+2 beacon fissi, ricordare che questa configurazione è raccomandata solo per utenti avanzati e solo quando una configurazione con quattro beacon fissi sopra l’area di volo, molto più semplice, robusta e persino più precisa, non può essere utilizzata o risulta impraticabile
Consultare la pagina Prodotti per le varie opzioni di starter set.
Tenere presente che soli tre beacon fissi offrirebbero scarsa resilienza contro le ostruzioni per il tracciamento 3D (XYZ). Qualsiasi occlusione di un beacon fisso – una situazione di assenza di linea visiva/uditiva diretta – porterà all’assenza di tracciamento o a un tracciamento errato – come nel GPS: “nessuna visibilità satellitare = nessuna coordinata GPS = nessun tracciamento”.
Pertanto, raccomandiamo almeno una ridondanza N+1 per i beacon fissi. Ed è per questo che i nostri starter set per il 3D sono composti da 4 beacon fissi.
Ancora meglio è avere una ridondanza 2N con sottomappa 3D completamente sovrapposte. Ciò corrisponde a 3+3 o 4+4 beacon fissi. Il sistema sceglierà automaticamente la sottomappa migliore per il tracciamento. Un sistema di questo tipo è molto resiliente e, con un corretto posizionamento dei beacon, è possibile volare anche in ambienti complessi con colonne, ad esempio, senza problemi di tracciamento.
La chiave per un eccellente tracciamento è garantire una copertura adeguata in ogni punto di volo. Ciò significa che i beacon mobili sul drone devono avere tre o più beacon fissi appartenenti alla stessa sottomappa con una linea visiva/uditiva diretta e libera entro 30m.
Il corretto posizionamento è di solito fondamentale e vitale per i droni, poiché richiedono capacità 3D; i droni sono veloci e gli errori possono essere particolarmente costosi. A cosa prestare attenzione?
- Il requisito più critico per un buon tracciamento o volo autonomo è garantire una linea visiva/uditiva libera dai beacon mobili sul drone verso 3 o più beacon fissi
- Non fare affidamento sui magnetometri in ambienti chiusi. Utilizzare la configurazione Beacon Abbinati per Posizione+Direzione
- Posizionare i beacon fissi in modo che gli angoli dal beacon mobile ai beacon fissi siano di 30 gradi o più. Vedi una spiegazione più dettagliata nel video
- Utilizzare le configurazioni Precise-Z quando non è possibile ottenere angoli adeguati verso i beacon fissi in altri modi
Tracciare un singolo drone indoor in un unico ampio spazio aperto è molto semplice. Con uno Starter Set Super-MP o uno Starter Set NIA-SmallDrone, il sistema di tracciamento 3D preciso può essere configurato in 10-15 minuti, incluso il disimballaggio e gli aggiornamenti software, su un set appena ricevuto. Se tutti gli aggiornamenti software iniziali sono stati completati prima della configurazione, il sistema può essere operativo in meno di un minuto.
Il volo autonomo è un’attività significativamente più complessa, poiché è necessario tracciare con precisione un drone e integrare il suo autopilota con il drone/telaio, che è tipicamente composto da parti diverse (telaio, motori, driver dei motori, telemetria, telecomando). Oltre a ciò, l’autopilota deve essere integrato con il sistema di posizionamento indoor come descritto sopra.
Se il volo autonomo di un singolo drone è già un’attività impegnativa, il volo autonomo di uno sciame di droni rappresenta il vertice di questa piramide di complessità. È ancora più impegnativo, ma comunque realizzabile se affrontato un passo alla volta.
Prima di addentrarci negli sciami di droni indoor, rispondiamo alla domanda fondamentale: “Come volano quelle migliaia di droni nel cielo?” – ebbene, è semplice – utilizzano il sistema di posizionamento RTK GPS. Tuttavia, va ricordato che il GPS RTK si basa sul GPS. Se non c’è GPS, non c’è nemmeno GPS RTK. Pertanto, non appena ci si sposta in ambienti chiusi o in altre aree GNSS-denied, dimenticarsi del GPS (GLONASS, Beidou, Galileo, ecc.)
I droni piccoli sono troppo piccoli. I droni grandi sono troppo grandi
Avere un enorme sciame di droni di piccole dimensioni e mettere in scena un bello spettacolo sarebbe fantastico. Tuttavia:
- Dimensione della batteria vs. durata dello spettacolo vs. dimensione del drone
- L’autopilota e il sistema di posizionamento indoor hanno una massa non nulla. Esiste un limite inferiore alla dimensione dei droni
- I droni necessitano di una direzione. La direzione si ottiene al meglio con due o più punti di posizionamento sul drone. Più sono distanti, maggiore è la precisione angolare
Se i droni sono troppo grandi:
- È difficile mantenerli separati. È necessaria una distanza di sicurezza maggiore tra di essi e, di conseguenza, uno spazio più ampio per lo spettacolo
- I droni più grandi sono più pesanti, più rumorosi e più pericolosi. Il rumore e le reti di protezione possono rovinare l’intera idea dello spettacolo
Tenere i droni convinti di essere soli
In molti casi, è possibile impostare il volo autonomo di più droni in modo che non siano nemmeno consapevoli dell’esistenza degli altri droni intorno a loro. Credono di essere così unici e così speciali. È nel tuo interesse mantenerli in questa ingenua convinzione, perché è il modo più semplice per creare sciami di droni.
Esempi di configurazioni del sistema di posizionamento indoor per spettacoli di droni basati su Marvelmind Indoor "GPS"
Utilizzando una combinazione di soluzioni, è possibile far volare uno sciame di droni con IA: Sistema di posizionamento indoor per spettacoli e sciami di droni.
Questa soluzione complessa potrebbe non essere adatta se sei nuovo al nostro sistema o ai droni in generale. Offre però le migliori prestazioni per gli spettacoli di droni indoor, poiché consente di far volare più droni autonomi senza riduzione della frequenza di aggiornamento della posizione e garantisce la massima precisione di posizionamento di ±2cm.
Configurazione:
- IA
- 4 x https://marvelmind.com/product/super-beacon/ – beacon fissi posizionati intorno e sopra l’area di volo
- 1 x Modem v5.1
- 10 x Mini-RX + Microfono – un beacon mobile ibrido per ogni drone
Come discusso in precedenza, la prima cosa da decidere è se si ha bisogno della direzione basata sui Beacon Accoppiati. Se necessario, occorrono due beacon mobili per drone. Se non è necessario, basta un solo beacon mobile per drone.
È possibile volare con un singolo beacon mobile, ma il software sull’autopilota deve essere più complesso – non è una soluzione immediata perché deve fornire la direzione e la correzione della deriva del giroscopio del drone durante il volo. È complesso. Fattibile. Ma complesso. E se possibile, raccomandiamo sempre la configurazione con Beacon Accoppiati come soluzione semplice per la direzione in ambienti indoor, anche in condizioni statiche.
Tuttavia, come discusso in precedenza, per gli sciami di droni o gli spettacoli con droni in ambienti indoor, potrebbe non essere la soluzione migliore. Pertanto, assumeremo un’opzione più complessa e fragile basata su un singolo beacon mobile come variante principale per il drone.
Configurazione:
- MF NIA – MF NIA è fortemente consigliato per gli sciami di droni perché NIA sarebbe troppo lento, e i droni potrebbero essere troppo rumorosi per IA
- 4 x https://marvelmind.com/product/super-beacon/ – beacon fissi posizionati intorno e sopra l’area di volo
- 1 x Modem v5.1
- 10 x Super-Beacons – beacon mobili per dieci droni
- 14 x licenze MF NIA
Se i tuoi droni sono piccoli e non riescono a portare un carico da 27 g (una versione ridotta del Super-Beacon), allora il Mini-TX senza batteria aggiuntiva e scocca è la scelta migliore. Nella configurazione ridotta, pesa solo 6,7 g.
Tuttavia, il Mini-TX funziona solo su una frequenza (31 kHz). Pertanto, NIA rimane l’unica opzione. Di conseguenza, se si hanno dieci droni, la frequenza di aggiornamento della posizione per drone sarà 1/10 della frequenza di aggiornamento della posizione del sistema. Per una piccola submap di 5x5m, è possibile ottenere 20-25 Hz per sistema. Quindi, per drone, la frequenza di aggiornamento della posizione sarà di circa 2-2,5 Hz. Questa frequenza di aggiornamento è adatta per spettacoli a movimenti lenti. Ma è comunque molto meglio di niente.
Configurazione:
- NIA
- 4 x https://marvelmind.com/product/super-beacon/ – beacon fissi posizionati intorno e sopra l’area di volo
- 1 x Modem v5.1 – un controller centrale del sistema. È possibile monitorare i dati e controllare i droni attraverso di esso
- 10 x Mini-TX – beacon mobili per dieci droni
Sistemi basati su UWB
I sistemi di posizionamento indoor per droni basati su UWB non differiscono molto in linea di principio dal Marvelmind Indoor “GPS”. Naturalmente, la tecnologia sottostante è diversa (tempo di volo dell’UWB rispetto al tempo di volo degli ultrasuoni). Ma l’architettura e gli elementi della rete sono molto simili.
Differenze pratiche tra UWB e Marvelmind Indoor “GPS”:
- UWB è circa dieci volte meno preciso degli ultrasuoni, ovvero i droni sono più stabili in volo
- Tuttavia, UWB non è influenzato in linea di principio dal rumore acustico dei droni
- UWB può supportare in linea di principio più droni contemporaneamente. Se UWB supporta effettivamente più droni nella realtà e la conseguente frequenza di aggiornamento per drone dipende dall’implementazione del sistema UWB. I sistemi basati su IA possono facilmente rivaleggiare con i sistemi basati su UWB in termini di capacità e superarli in termini di precisione di un fattore dieci
Sistemi ottici - codici QR intorno
Diventa sempre più popolare grazie alla sua potenziale semplicità:
- Una fotocamera è rivolta verso il basso verso i codici QR (o altri pattern speciali) sul pavimento. I codici QR forniscono sia la posizione che la direzione
- I codici QR possono essere sopra i droni (soffitti), se più comodo
- I codici QR possono essere intorno al drone, ma in tal caso sono necessarie più fotocamere o speciali fotocamere “fish-eye”
Pro:
- Sistema di posizionamento relativamente economico
- Non è necessario avere beacon attivi intorno
Contro:
- Necessità di codici QR intorno – a volte sono indesiderati o addirittura impossibili da installare
- Requisiti per un’illuminazione speciale
- Sistema basato su triangolazione, quindi i codici QR devono essere densi e abbastanza vicini, altrimenti la precisione della posizione ne risente
Considera un’alternativa: Piattaforma di atterraggio autonoma per droni.
Sistemi basati su motion capture
Gli spettacoli con droni molto impressionanti ci inducono a credere che i droni siano così intelligenti. Tuttavia, questa visione è molto ingannevole. Il sistema di posizionamento è il gioiello della configurazione – non i droni. I droni sono piuttosto semplici. Non sono nemmeno consapevoli di essere tracciati. Inoltre, sono completamente controllati da remoto sulla base dei dati di posizione provenienti dal sistema di tracciamento. Quindi sono ancora più semplici. Ma va bene così. Non importa come viene raggiunto il risultato, purché la performance sia impressionante e davvero impressionante.
Sistemi basati su motion capture:
- Sono costosi o molto costosi perché richiedono fotocamere a infrarossi veloci ad alta risoluzione, una grande quantità di connessioni dati (cablaggi) tra le fotocamere e il computer centrale, un computer potente e costoso, e un’illuminazione a infrarossi speciale
- Sono naturalmente limitati nell’area coperta perché la posizione è basata sulla triangolazione, e sono tipicamente limitati a circa 10x10m
- Dal lato positivo, i tracker sui droni sono leggeri e passivi – solo riflettori di luce
Esempi di implementazione di posizionamento indoor preciso, tracciamento e navigazione per droni su Marvelmind Indoor "GPS"
Tracciamento preciso (±2cm) di un quadricottero DJI Phantom in ambienti indoor in 3D (XYZ)
- Tracciamento preciso in X,Y,Z (vista XY + vista XZ + vista YZ)
- Dati grezzi e dati post-elaborati dal Player del Dashboard – si noti che oggi lo stesso è disponibile non nella post-elaborazione ma nel Player in Tempo Reale
- L’ecosistema DJI è chiuso, almeno per le serie Phantom e Mavic. Pertanto, è possibile tracciare il Phantom ma non volare autonomamente in ambienti indoor (senza un’elaborazione più approfondita)
- Scopri di più su Volo autonomo indoor con droni DJI
Tracciamento preciso (±2cm) di un quadricottero DJI Phantom in ambienti outdoor in 3D (XYZ)
- Tracciamento preciso (±2cm) in XYZ (vista XY + vista XZ + vista YZ) – uguale a quello precedente, ma in ambienti outdoor
- La stessa configurazione Precise-Z composta da 4+2 beacon fissi è utilizzata in questa demo e nella precedente. Per ulteriori informazioni, consultare il Manuale di Installazione
- Scopri di più su Volo autonomo indoor con droni DJI
Volo completamente autonomo in ambienti indoor
- Un piccolo elicottero vola in modo completamente autonomo affidandosi a Marvelmind Indoor “GPS”
Utilizzo di IA per il tracciamento indoor di droni e per gli sciami di droni indoor
Con una combinazione di soluzioni, è possibile utilizzare IA per il posizionamento indoor dei droni:
- Speciale deflettore ultrasonico che protegge il microfono dal rumore delle eliche
- Posizionamento dei beacon fissi chiaramente al di sopra del drone
- Utilizzo di filtri DSP speciali, stretti e precisi
Tracciamento indoor di droni piccoli e micro-droni
È possibile tracciare anche micro-droni (meno di 100 g) con l’aiuto dei beacon Mini-TX.
Starter Set NIA-SmallDrone è specificamente progettato per questo tipo di droni.
La configurazione minima per il tracciamento del drone sarebbe qualsiasi set NIA con capacità 3D. Ad esempio, tre beacon fissi + 1 beacon mobile + 1 modem e Non-Inverse Architecture (NIA) o Multi-Frequency NIA (MF NIA) sarebbero già sufficienti per il drone.
Droni per l'ispezione di magazzini
L’utilizzo di droni per l’ispezione di magazzini è molto diffuso – per trovare pallet smarriti, per la sicurezza, ecc. Sì, è un compito fattibile ma molto complesso in pratica:
- Ambiente molto impegnativo in generale
- I droni cadono e si rompono => alto costo degli errori
- I droni sono potenzialmente pericolosi da far volare e difficili da sviluppare e utilizzare
Tuttavia, la soluzione è molto promettente. Pertanto, i costruttori di droni o i costruttori di sistemi per magazzini utilizzano il nostro sistema di posizionamento indoor per tali soluzioni. Nel video, spieghiamo le peculiarità dell’ambiente (corridoi stretti e scaffalature alte), come le peculiarità influenzano la precisione e come costruire il sistema in modo ottimale.
Piattaforma di atterraggio autonoma per droni
È possibile costruire una piattaforma di atterraggio autonoma per un drone. Può anche essere mobile:
- Si posizionano quattro Super-Beacons fissi rivolti verso l’alto sui bordi della piattaforma. Più grande è la piattaforma, migliore è la precisione della distanza
- Si montano due Super-Beacons mobili rivolti verso il basso
Il drone vola utilizzando il regolare RTK GPS o anche il GPS quando si trova lontano e fino a 30 m dalla piattaforma. È agganciato alle coordinate Indoor “GPS” e atterra basandosi su queste coordinate. Come accennato, la piattaforma può essere statica rispetto alla Terra o in movimento. Non fa differenza per il drone. Quindi, è possibile atterrare con precisione su un veicolo in movimento, ad esempio.
Volo autonomo da parte dei nostri clienti
Volo autonomo da parte dei nostri clienti con Pixhawk + Marvelmind
"Posso far volare il DJI Mavic autonomamente in ambienti indoor?
Sì, puoi.
Scopri di più su Volo autonomo indoor con droni DJI.