🇪🇸
Contenido de Marvelmind en español
Todas las páginas, documentos y recursos en español en un solo lugar.
⚡
Aplicaciones

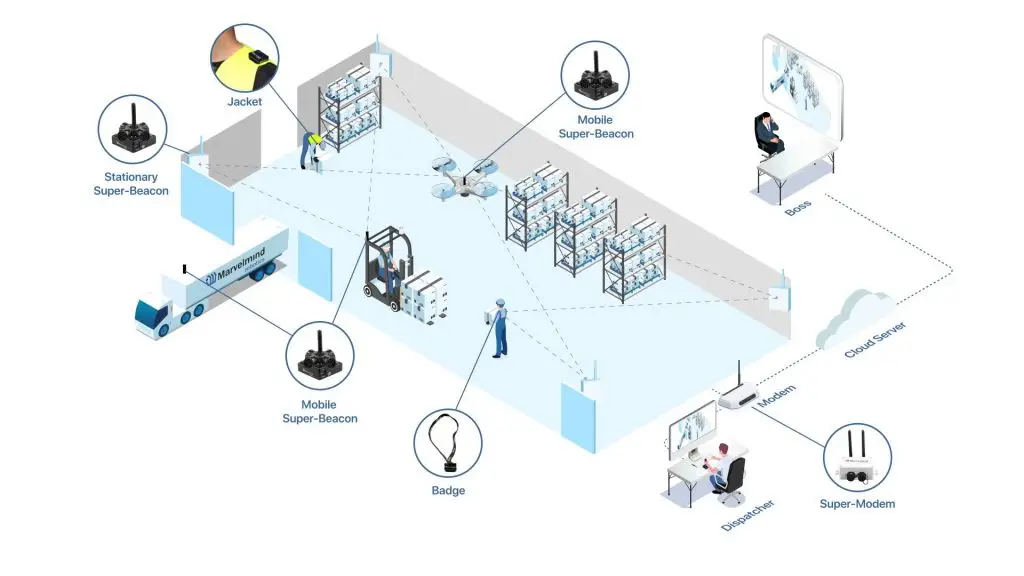
🤖 Posicionamiento de robots AGV
Sistema de navegación indoor para robots móviles autónomos y AGVs. Precisión ±2 cm, funciona sin GPS en entornos industriales.
Abrir

🚁 Drones: navegación indoor
Vuelo autónomo de drones en interiores con precisión ±2 cm. Compatible con Pixhawk, ArduPilot, PX4 y DJI.
Abrir

🏭 Seguimiento de carretillas elevadoras
Posicionamiento preciso de carretillas elevadoras y AGVs en almacenes y plantas de producción. Integración con WMS.
Abrir

✈️ Drones DJI: GPS indoor
Integración del sistema Marvelmind con drones DJI para vuelo autónomo en interiores.
Abrir

👷 Seguimiento de personas
Sistema de monitorización de personal en tiempo real: trabajadores, empleados de almacén, visitantes. Precisión ±2 cm.
Abrir
📖
Tecnología y empresa

🔬 Tecnología de posicionamiento indoor
Principio de funcionamiento del sistema RTLS ultrasónico: arquitecturas NIA e IA, especificaciones, comparación con UWB y GPS.
Abrir
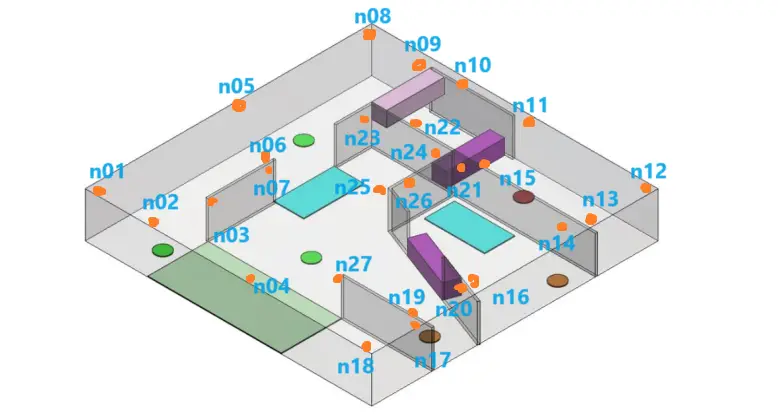
📐 Cómo planificar el sistema
Guía paso a paso para planificar: cálculo de balizas, elección de arquitectura, planificación de cobertura.
Abrir
🏢 Sobre Marvelmind
Historia de la empresa, equipo de ingeniería, fabricación en Shenzhen, sede en Tallin (Estonia).
Abrir
🎯
Pedido y envío

📄
Documentos PDF
Presentación de Marvelmind
Resumen del sistema, aplicaciones y tecnología. Ideal para una primera introducción.
PDF
Comparación de arquitecturas
Comparación detallada de las arquitecturas NIA, IA y MF-NIA con ejemplos de aplicación.
PDF
Manual de colocación
Reglas de instalación de balizas, cálculo de cobertura y ejemplos de colocación.
PDF
🤖
Online
Asistente AI de Marvelmind
Haga su pregunta en español — el asistente responderá basándose en la documentación oficial.
Abrir asistente