🇧🇷 Mais páginas em português:Sobre nós Robôs Drones Empilhadeiras DJI Pessoas Formas de pagamento Entrega
Tecnologia
Visão Geral da Tecnologia Marvelmind
Explore a tecnologia central por trás do sistema de posicionamento indoor centimétrico da Marvelmind: RTLS baseado em ultrassom, arquiteturas de sistema e guias de engenharia para robôs industriais reais, empilhadeiras, drones e rastreamento de pessoas. Use esta página como ponto de entrada para todos os artigos técnicos sobre como a Marvelmind funciona e como ela se compara a outras tecnologias RTLS.
Solicitar Consultoria Técnica ↗
Fale diretamente com os engenheiros da Marvelmind sobre seu armazém, fábrica, túnel ou laboratório específico.
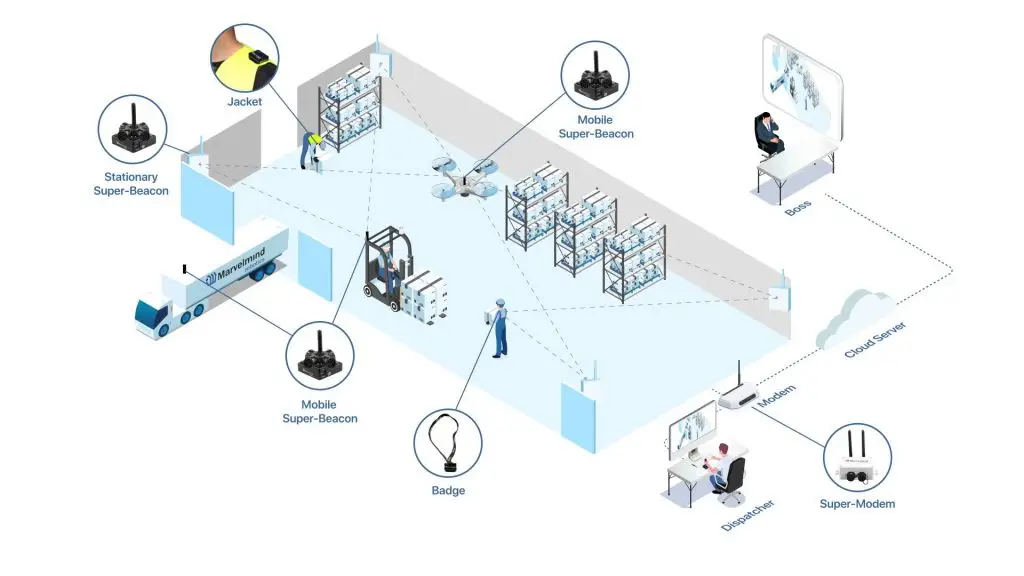
O RTLS baseado em ultrassom da Marvelmind combina balizas fixas e móveis, modems sincronizados e software para posicionamento indoor preciso.
Artigos sobre Tecnologia Central
Comece com estes artigos fundamentais para entender por que a Marvelmind é mais precisa que o UWB e como o sistema é construído e implantado.Fundamentos
Por que o Ultrassom Supera o UWB no Posicionamento Indoor Industrial
Explicação baseada em física de por que o Time-of-Flight por ultrassom oferece precisão de até ±2 cm e por que é mais robusto que o UWB em ambientes industriais com muito metal e ruído de radiofrequência.Arquitetura
Como Funciona o Sistema de Posicionamento Indoor da Marvelmind
Visão detalhada dos componentes do sistema, arquiteturas suportadas (IA, NIA, MF-NIA), regras de instalação, submapas e opções de escalabilidade para grandes armazéns, fábricas e túneis.Realidade do Mercado