Home » Customer success: Autonomous flight of indoor drone based on PixHawk + ArduPilot
Autonomous flight of indoor drone based on PixHawk + ArduPilot
Customer success shared to speed everyone's progress with similar configurations
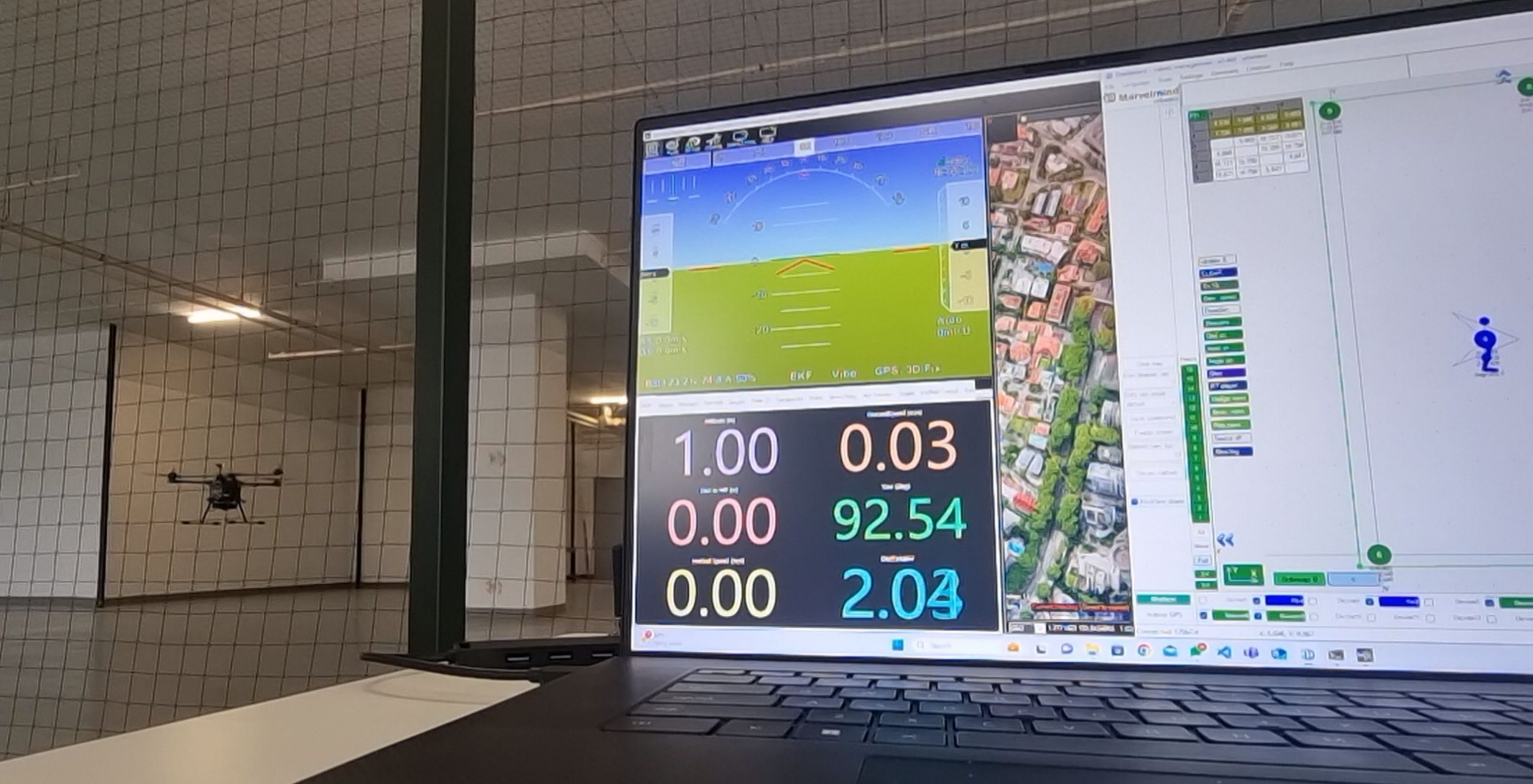
We had an email exchange with one of our customers and they shared some of the current results with their autonomous indoor drone project based on PixHawk and ArduPilot. We asked their permission and believe it is worth sharing to ease everyone’s progress who are building similar configurations.
Configuration
- PixHawk-controlled drone medium to larger size
- ArduPilot stack
- Indoors only
- 4 x Super-Beacons as stationary placed near the ceiling and facing down
- 2 x Super-Beacons as mobile for Location + Direction and facing up
- 1 x Modem v5.1 as a central controller
- NIA
Basic system description
If you are not yet familiar with out system, here are the links to start with:
Basic system description applied to this case is below:
- Mobile beacons on the drone under radio control of the modem emit short ultrasound pulses
- The clocks of all network elements (stationary and mobile beacons, modem) are synchronized via radio in a license-free band on a microsecond level by the modem – the central controller of the system
- Since all network elements know when exactly the ultrasound pulses were emitted, the system is able to calculate the exact time of flight of the pulses and as a result – the distance between the mobile beacons and stationary beacons since the speed of sound in the air is known
- By knowing the distance from a mobile beacon to three or more stationary beacons, the system calculates the location of each mobile beacons with ±2cm accuracy using multilateration
- By knowing location of both mobile beacons with ±2cm accuracy and having a base between them about 50 cm and applying a sensor fusion with IMU to make the measurements more robust, and faster and low-latency at the same, the system calculates and shares the direction of the drone with PixHawk replacing the magnetometer’s data that typically cannot be trusted indoors due to magnetic fields produced by currents or due to other distortions of the Earth magnetic fields
Thus, the keys for the system to work well:
The basic videos above and descriptions aimed at:
- Showing that autonomous drones using PixHawk and ArduPilot or PX4 are the easiest way to build an autonomous drone using our system since both ecosystems – Marvelmind and PixHawk/ArduPilot – have open interfaces and designed to be flexible. Most importantly, they are designed for autonomous drones, robots, and vehicles
- Yes, there are many settings and trying to jump to the final configuration may lead to a loss of time because it is difficult to debug if there was a mistake on the way. But a basic step-by-step approach with very small steps and verification of a success on each step help to build as complex system as you wish and an autonomous drone based on PixHawk and ArduPilot using Marvelmind indoor positioning system is not that complex after all
More about PixHawk and ArduPilot/PX4 integration: https://marvelmind.com/download/#pixhawk.
More about indoor positioning system for autonomous indoor drones on the main Drones page.