Tecnologia
Panoramica della Tecnologia Marvelmind
Esplora la tecnologia alla base del sistema di posizionamento indoor centimetrico di Marvelmind: RTLS a ultrasuoni, architetture di sistema e guide tecniche per robot industriali, carrelli elevatori, droni e tracciamento di persone. Usa questa pagina come punto di accesso a tutti gli articoli tecnici su come funziona Marvelmind e come si confronta con altre tecnologie RTLS.
Richiedi una Consulenza Tecnica ↗
Parla direttamente con gli ingegneri Marvelmind del tuo specifico magazzino, fabbrica, tunnel o laboratorio.
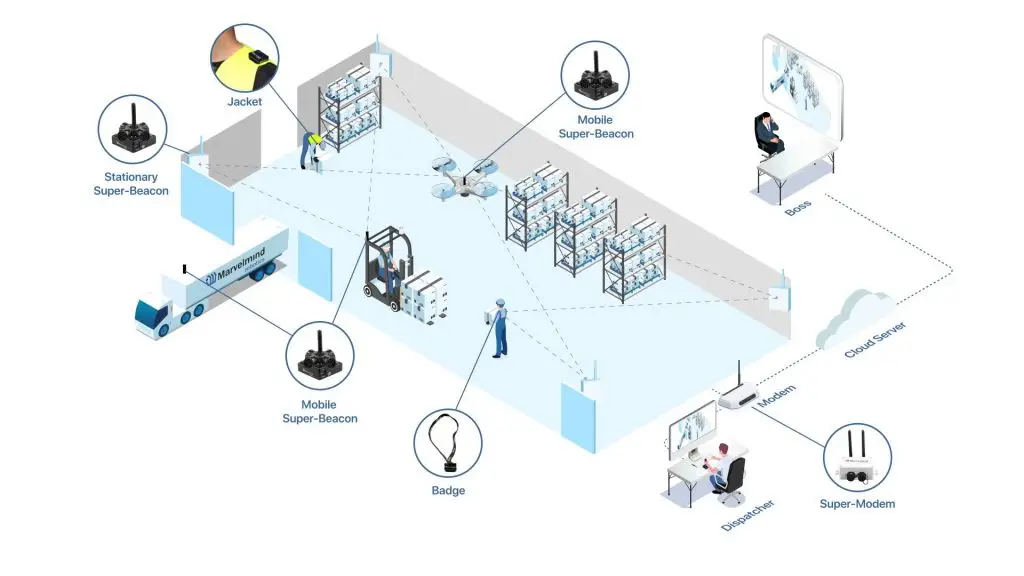
Il RTLS a ultrasuoni di Marvelmind combina beacon fissi e mobili, modem sincronizzati e software per un posizionamento indoor di precisione.
Articoli sulla Tecnologia di Base
Inizia con questi articoli fondamentali per capire perché Marvelmind è più preciso di UWB e come il sistema viene costruito e implementato.Fondamenti
Perché gli Ultrasuoni Superano UWB per il Posizionamento Indoor Industriale
Spiegazione basata sulla fisica di perché il Time-of-Flight a ultrasuoni fornisce una precisione fino a ±2 cm e perché è più robusto di UWB in ambienti industriali con molto metallo e rumore RF.Architettura
Come Funziona il Sistema di Posizionamento Indoor Marvelmind
Panoramica dettagliata dei componenti del sistema, architetture supportate (IA, NIA, MF-NIA), regole di installazione, sotto-mappe e opzioni di scalabilità per grandi magazzini, fabbriche e tunnel.Realtà del Mercato