技术
Marvelmind 技术概览
探索 Marvelmind 厘米级室内定位系统的核心技术:基于超声波的 RTLS、系统架构,以及适用于真实工业机器人、叉车、无人机和人员追踪的工程指南。 本页面是所有关于 Marvelmind 工作原理及其与其他 RTLS 技术对比的技术文章的入口。
申请技术咨询 ↗
直接与 Marvelmind 工程师沟通,探讨您的仓库、工厂、隧道或实验室的具体需求。
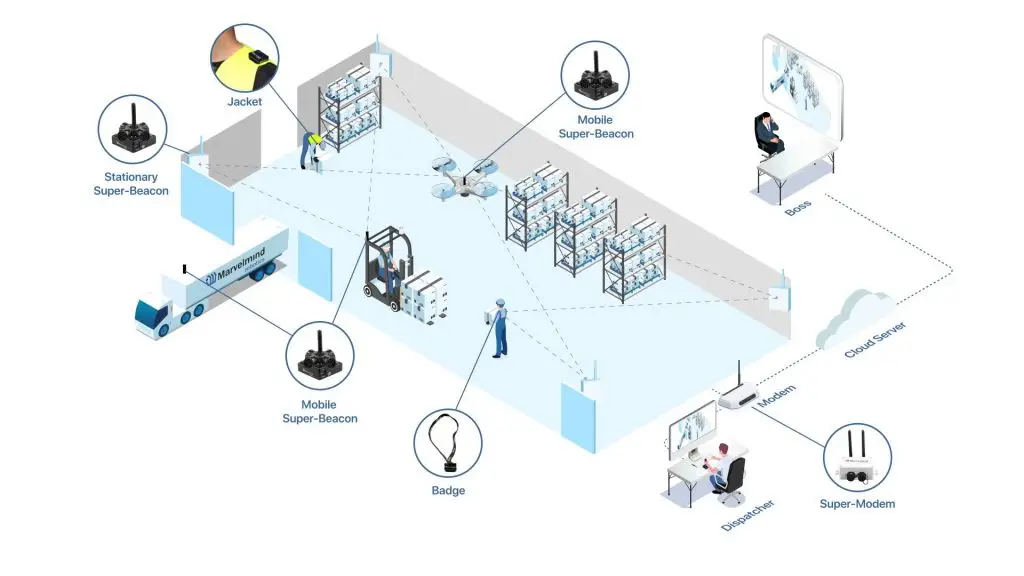
Marvelmind 基于超声波的 RTLS 将固定信标与移动信标、同步调制解调器及软件相结合,实现精准的室内定位。