🇯🇵
Marvelmindの日本語コンテンツ
すべての日本語ページ、ドキュメント、リソースを一か所に。
⚡
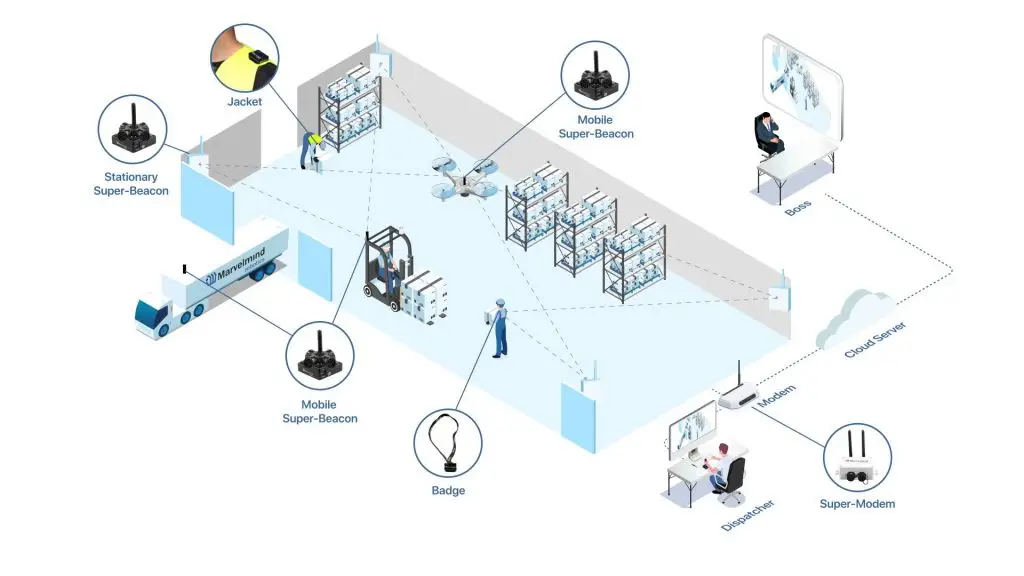
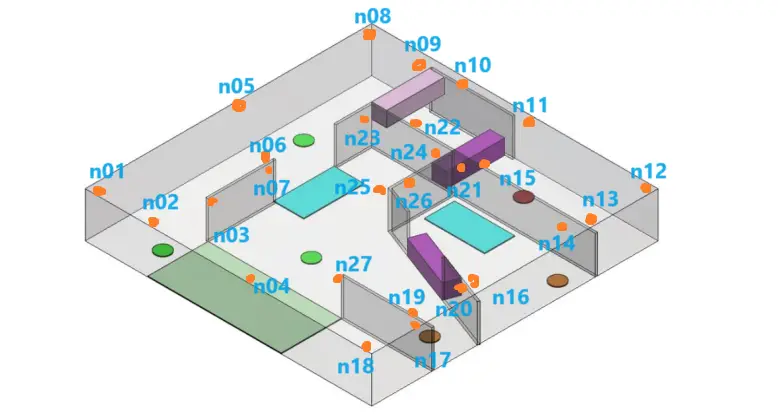
アプリケーション





📖
技術と会社

🎯
注文と配送

📄
PDFドキュメント
🤖