DJIドローンを屋内で自律飛行させるには?

- DJI Mobile SDK v5に対応したドローンを1機用意する
- リモコンはDJI RC N1(Marvelmindでテスト済み)またはDJI RC N2(顧客によるテスト済み)を用意する
- リストに掲載されているその他のドローンやリモコンも対応しているはずですが、実際にはテストされていません
- Android 10以降のスマートフォンを用意する
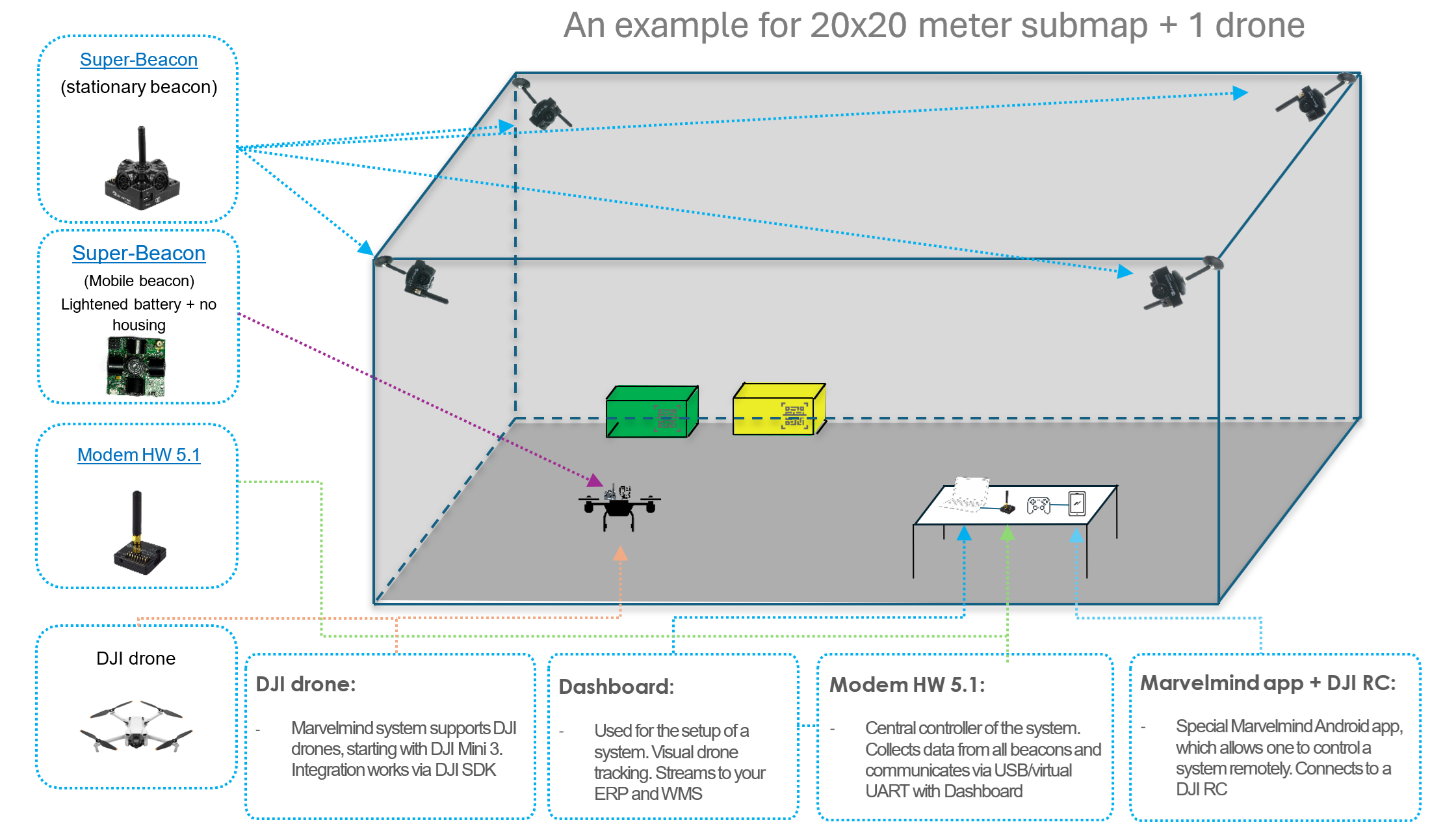
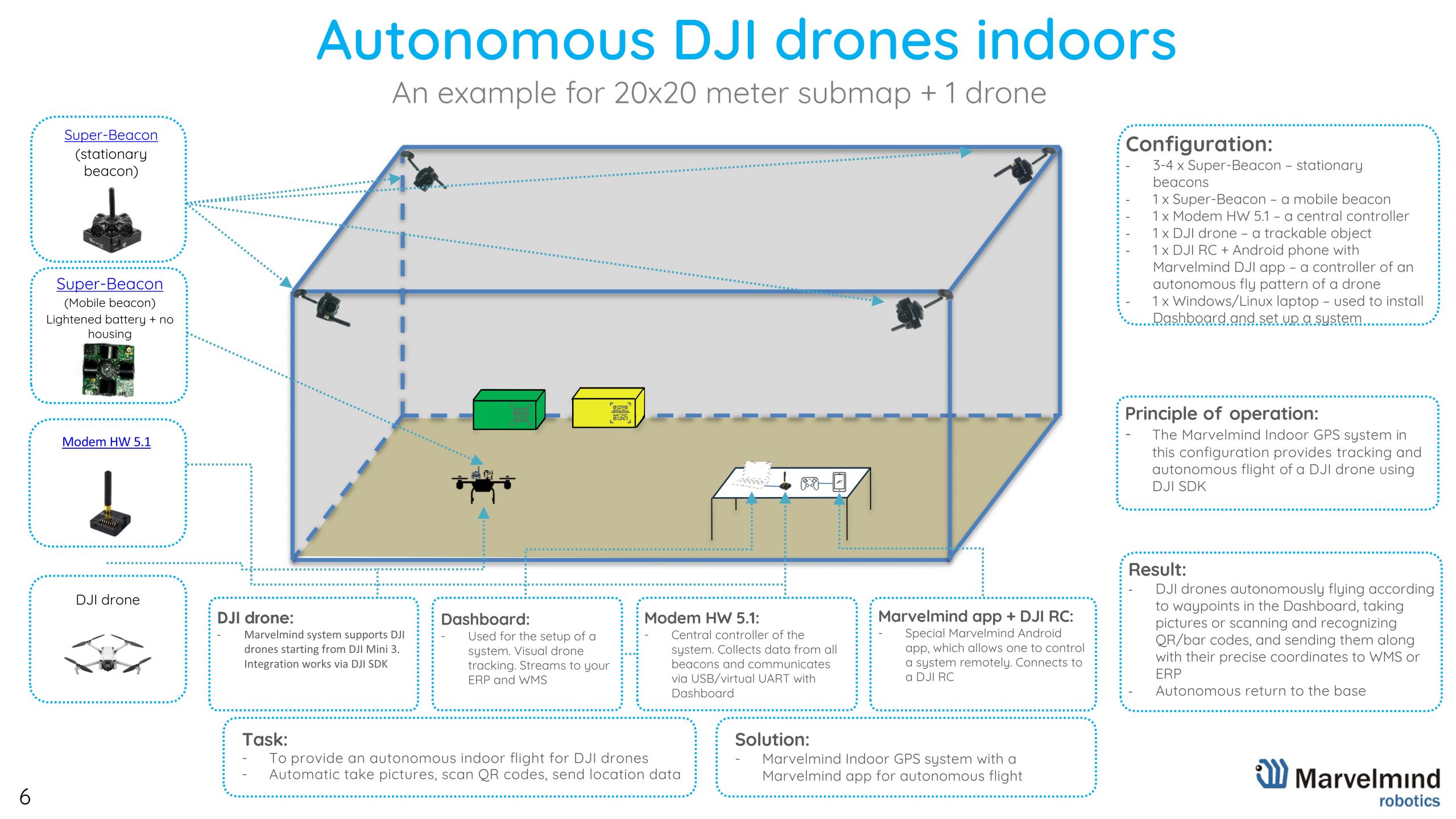
- 固定ビーコンとして3〜4台の(Super-Beacons + マグネットホルダー)を用意する
- モバイルビーコンとして1〜2台のSuper-Beaconsを用意する。小型ドローンを使用する場合は、飛行時間を延ばすために軽量化してください:バッテリーを小型のものに交換したり、シェルを取り外したりする
- 中央コントローラーとしてModem v5.1を1台用意する
- Marvelmind DJI SWパックをダウンロード・インストールして使用する。PCにDashboardをインストールし、AndroidスマートフォンにMarvelmind DJIアプリをインストールする
- MMSW0019:DJI向け屋内自律飛行サポートライセンスを取得し、ご使用のモデムのCPU IDで弊社に登録する
- Marvelmind DJI自律飛行マニュアルに従って操作する
- 自律飛行をお楽しみください 🙂
更新日:2025年10月27日
- 最新のMarvelmind DJIソフトウェアパック: marvelmind_DJI_SW.zip – 複数のマイナー改善とバグ修正を含む最新アップデート
更新日:2025年7月30日
- 最新のMarvelmind DJIソフトウェアパック: marvelmind_DJI_SW.zip – リンクは常に同じですが、新しいソフトウェアリリースが含まれています
- 複数のマイナーな変更と改善
更新日:2025年5月25日
- 最新のMarvelmind DJI SW(marvelmind_DJI_SW_v8_220_2025_05_22_release.zip)はAndroid MSDK v5に対応しています。今すぐダウンロード。たとえばDJI Mini 4 Proをはじめ、その他のドローンでも飛行できます
- 弊社のお客様の一人が、DJI RC N2で新しいSWのテストに成功しました
更新日:2025年3月30日
- DJIがSDKをアップデートしました。これにより(ついに!)DJI Mini 4 Proのサポートが追加され、その他いくつかの改善も行われました。詳細はこちら: https://developer.dji.com/doc/mobile-sdk-tutorial/en/:
現時点ではMSDK v5.13.0への移行はまだ行っておらず、お客様からの強い要望があった際に移行する予定です。Mini 4 Proや新たにサポートされたリストに含まれるドローンでの飛行をご検討の場合は、info@marvelmind.comまでご連絡ください。新しいSDKへの移行を進めます。ただし、移行前にご購入いただくことが条件となります。
- DJI vs. PixHawk/ArduPilot/PX4 – お客様のニーズに最適なドローンプラットフォームをお選びください
更新日:2025年3月1日
- 最新のMarvelmind DJI SWパックをダウンロード・インストールしてご使用ください。PCにDashboardをインストールし、DJI RC-N1に接続されたAndroidスマートフォンにMarvelmind DJIアプリをインストールしてください
更新日:2025年1月9日
- DJI Mobile SDK v5に対応したドローンを1機用意する
- リモコンはDJI RC-N1を用意する
- Android 10以降のスマートフォンを用意する
- 固定ビーコンとして3〜4台の(Super-Beacons + マグネットホルダー)を用意する
- モバイルビーコンとして1〜2台のSuper-Beaconsを用意する。小型ドローンを使用する場合は、飛行時間を延ばすために軽量化してください:バッテリーを小型のものに交換したり、シェルを取り外したりする
- 中央コントローラーとしてModem v5.1を1台用意する
- Marvelmind DJI SWパックをダウンロード・インストールして使用する。DashboardとMarvelmind DJIアプリをインストールする
- MMSW0019:DJI向け屋内自律飛行サポートライセンスを取得し、ご使用のモデムのCPU IDで弊社に登録する
- Marvelmind DJI自律飛行マニュアルに従って操作する
- 自律飛行をお楽しみください 🙂
更新日:2024年8月1日
- DJIドローンの屋内飛行が可能になりました。そのため、以下の記事に含まれる一部の情報は古くなっています
- 弊社のアプリはDJI SDKを使用してドローンをリモート制御し、モバイルビーコンからの位置データに基づくウェイポイントを使って完全自律飛行を実現します。例えば、以下の古いDJIドローンの動画と同様に、ドローンに搭載したSuper-Beacon(軽量化のため100mAhバッテリー使用)やMini-TXを利用します
- このソリューションはまだ市販されていませんが、パイロットユーザーを募集しています。 詳細はinfo@marvelmind.comまでメッセージをお送りください
- DJI Mini 3およびDJI Mini 3 Proでテスト済み。同クラスおよびそれ以上の新しいドローンでも動作するはずです
- Matricesなどのより高度なドローンも同じ技術に対応できるはずです。別のSDKへのSW適応が必要になる場合があります(未確認)
2024年8月1日以前の古い情報(一部更新済み):
DJIドローンを屋内でトラッキングすることは簡単です。ただし、DJIドローンを屋内で自律飛行させることは、それほど単純ではありません。
この記事ではDJIドローンのみに焦点を当てています。DJIには独自の特性があるためです。屋内での自律ドローン飛行全般について詳しく知りたい場合は、メインのドローンページをご覧ください。
DJIドローンの問題点
クローズドなエコシステム:
- DJIはAppleに似た企業を構築しています:「囲い込み型」の「受け入れるか、去るか」という方針です。DJI以外の機器をDJIドローンに接続することは困難または不可能です
- DJI MavicやDJI Phantomのようなコンシューマードローンには外部GPS入力がありません。そのため、外部GPSソースやMarvelmind屋内「GPS」のような屋内RTLSソースを簡単に接続することは不可能です
- Matriceなどのより高価なDJIドローンには外部GPS入力がありますが、それらはDJI GPSトラッカー向けに設計されており、プロトコルが利用可能か、オープンか、または商業利用できるかどうかは不明です
屋内自律飛行を想定した設計ではない:
- DJIドローンには内部に磁力計/コンパスが搭載されており、屋外では有効ですが、屋内では非常に問題があります。屋内には常に金属や磁場を発生させる電流があり、地球の磁場が乱されます。その結果、コンパスのキャリブレーションが完了できず、ドローンの飛行開始が困難になることがあります
- コンパスを無効化することは不可能または困難です
DJIドローンの基本的な屋内トラッキングは簡単
DJIドローンやその他のドローンを屋内でトラッキングするのは簡単です:
- Marvelmind屋内「GPS」(例:Starter Set Super-MP)を用意する
- ビーコン間に見通しを確保し、距離が最大30mとなるように、室内に固定ビーコンを設置する
- ドローンにモバイルビーコンを取り付ける
- システムは約10秒で起動・動作開始します
- 手動モードでドローンを飛行させる
- 精確なトラッキングをお楽しみください
以下に屋内・屋外トラッキングの例を示します。これらの例では屋内・屋外のトラッキングに違いはありません。同じ技術、同じアプローチです。GPSに依存せず、屋内・屋外の両方でシステムを使用できることを示しています。
DJIドローンの屋内飛行に向けた潜在的な解決策
DJI Developer SDKを使用することで、DJIドローンを屋内で自律飛行させることが可能かもしれません。以下の方法でDJIドローンを使用できるという未確認の情報があります:
- DJIドローン(またはその他のドローン)に1台または2台のモバイルビーコンを搭載します。2台搭載する場合は位置+方向の取得が可能です
- モバイルビーコン(およびそのドローン)の位置がシステムによって特定されます
- 位置データは、必要なウェイポイントとドローンの現在位置を把握している外部コンピューターまたはオートパイロットに送信されます
- オートパイロットからの制御信号がDJI SDKを介してドローンにフィードバックされます。つまり、ドローンはSDK経由で人間が操作していると認識しますが、実際には自動的に飛行しています
これは機能するはずです。以前、別の基本的なドローンで同様のアプローチを実施しました:
これはDJIではなく別の基本的なドローンで実施したものですが、アプローチは非常に似ています。ドローンは自動制御されていることをまったく認識していませんでした。ドローンはオペレーターによって手動操作されていると認識していました。
DJIドローンを屋内で自律飛行させるその他の方法
内部GPSプロトコルのハッキング:
- ハードウェアと内部GPSプロトコルをハッキングして、ドローン内部にデータを送り込むことが可能です。ドローンは実際のGPSからデータを受信しているのか、Marvelmind屋内「GPS」からデータを受信しているのかを判別できません。このようなハッキングはそれほど難しくなく、プロトコルも入手可能であるという未確認の情報があります
リモコンのハッキング:
- DJIドローンのリモコンを物理的にハッキングすることが可能です。指による手動操作の代わりに、外部制御システムに接続されたデジタル-アナログコンバーターから電圧を入力することができます。この方法では、ドローンもリモコンも人間が操作していることを認識できません。外部オートパイロットがモバイルビーコンの座標に基づいてウェイポイント間をドローンに飛行させる一方、ドローンの内部制御システムが安定した飛行姿勢を維持します。つまり、両方の長所を活かした方法です
屋内自律飛行におけるDJIの代替手段
PixHawkなどをベースにしたドローンの自作:
- これは最も実績があり、最も確実に機能するソリューションです
- ハードウェアおよびソフトウェアのバリエーションが非常に多い:異なるメーカーからの多数のPixHawk HWバージョン
- 複数のSWプラットフォーム:PX4 vs. ArduPilot。設定に迷いやすく、混乱しやすい
- 入力、設定などについてほぼ完全な柔軟性があります。ほとんどがオープンソースであるため、SWを編集することさえ可能です
- 中〜上級ユーザー向け
- Marvelmindは複数の構成をテストおよびサポートしています。最新のテスト構成:PX4 + PixHawk 4: https://youtu.be/52e6eTZapJ8
その他のドローンとの統合:
- https://dronehub.ai
- https://www.parrot.com/en
- https://us.yuneec.com/
- https://freeflysystems.com/
- https://skyfish.ai/
- https://percepto.co/
- https://www.skydio.com/
- https://www.autelrobotics.com/
- https://www.symatoys.com/
- https://www.hubsan.com
- https://draganfly.com/
- https://www.flyability.com/