How to choose ultrasound frequency for beacons?
Quick hint: choose the same or different frequencies?
Short answer suitable for 95% of cases: if you purchase Super-Beacons or Industrial Super-Beacons, choose as many different frequencies as available. It will give you the most flexibility with the system and the most freedom:
- Works in IA
- Works in MF NIA
- Works in NIA
Intro
Marvelmind Precise Indoor Positioning System relies on two key technologies:
- Trilateration based on precise distance measurement using ultrasound pulses
- Precise clock synchronization between all network elements over the radio using the modem as a central controller
In this article, we mostly touch on the first topic – trilateration – and answer the questions of choosing between different ultrasound frequencies of Marvelmind beacons and why.
We don’t discuss radio connectivity in detail here. Remember, though, that your beacons and modems must support the same radio band, for example, the 868/915MHz band. You can’t combine Beacons HW v4.9 on the 433MHz band and Beacons HW v4.9 on the 915MHz band or Super-Beacons on the 915MHz band.
See more about radio connectivity.
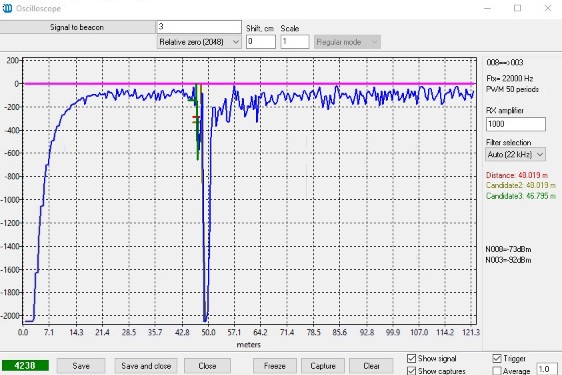
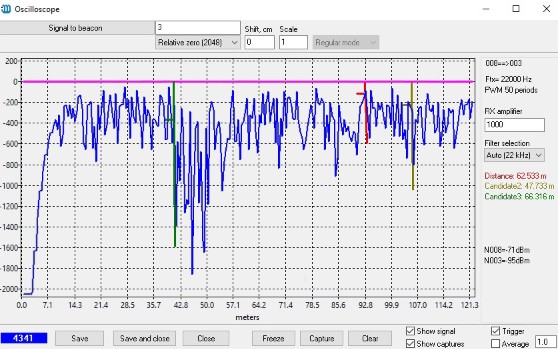
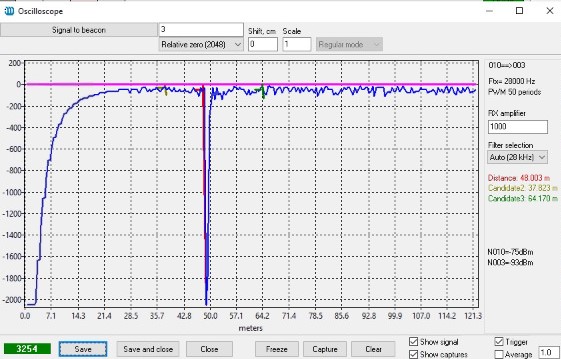
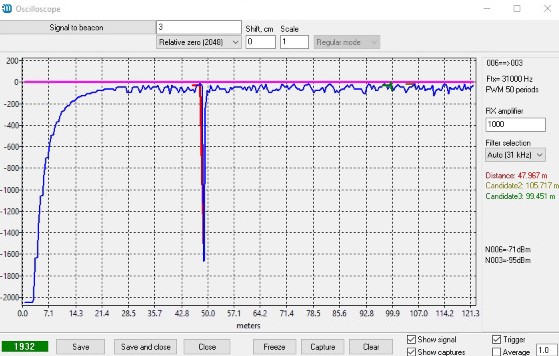
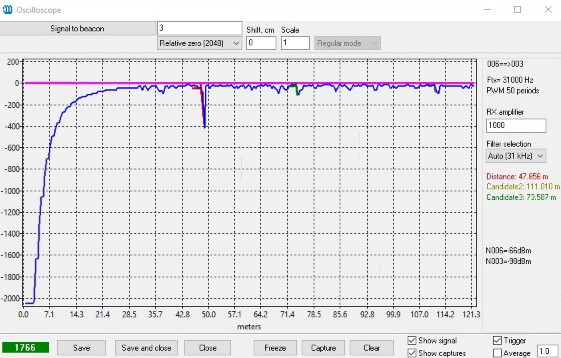
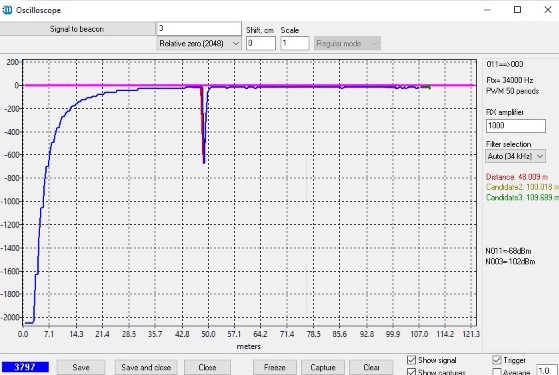
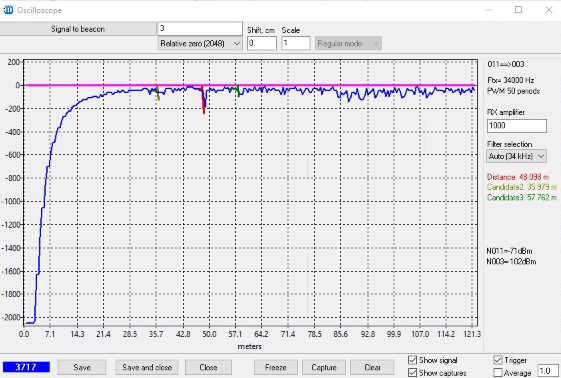
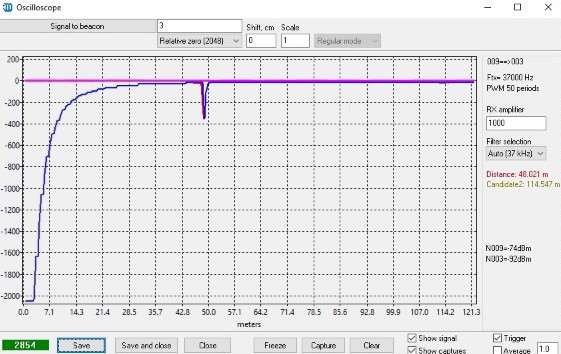
Real ultrasound signal examples from a steel-making plant
The oscillograms below are real examples from a steel-making plant:
- The signal from a Horn attached to an Industrial-RX beacon (left)
- Primary microphone only on the Industrial Beacon (right)
What to pay attention to:
- High external noise on lower frequencies (19kHz-22kHz)
- The significantly stronger signal from a beacon with Horn than without a Horn
- Significantly lower noise from the beacon with Horn due to the shielding effect – the external acoustic noise was coming from the floor, whereas the horn was located near the ceiling or pointed to the horizon since it has been used for positioning of the bridge cranes
- Significant ultrasound signal strength drop for higher frequencies (34kHz and 37kHz). The signal for 45kHz was even weaker (not shown).
- Significantly lower external noise for the higher frequencies (34kHz-45kHz)



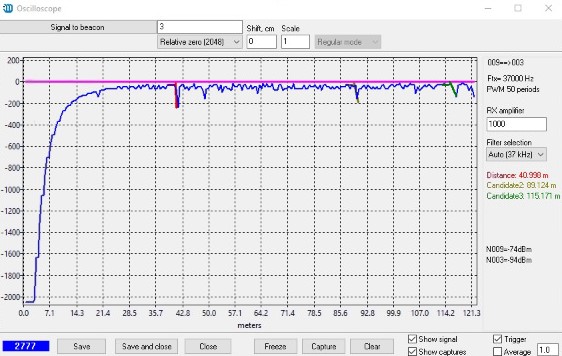
Help: how to use embedded oscilloscope
The Oscilloscope is a great tool for deeper system debugging. It allows you to see what the system hears and identifies:
- Noise
- Signal-to-noise ratio
- False signal that can trigger the wrong distance measurement
Why are there different ultrasound frequencies required?
To address the needs of as many different applications as possible – from autonomous robots, drones, forklifts, and humans to sports and archaeology – we produce beacons with different frequencies of ultrasound because some of the architectures that we have to require different frequencies (IA and MF NIA) and because different ultrasound frequencies have slightly different characteristics.
Naturally, potential users may have questions:
- Shall we use beacons with the same frequency or with different ones?
- How do we select the most suitable frequency for our beacons, and why?
- What are the practical differences between different ultrasound frequencies?
To simplify the decision process, we have different sets – for robots, drones, forklifts, people, etc. You purchase them, and they are already the most recommended configurations of beacons with the correct frequencies.
But why? What are the underlying principles behind those recommendations and beacons’ selection? Let’s discuss this deeper.
Question: Wouldn’t it be easier or better to have only a single frequency for all beacons?
Answer: Yes, it would be if it was practically feasible. However, there are several factors against it. Thus, multiple frequencies are better in practice:
- To distinguish between ultrasound signals coming from different ultrasound transmitting beacons, the signal must be distinguishable or modulated. For example, amplitude modulation, frequency modulation, and phase modulation – our typical suspects
- However, highly-resonating ultrasound transducers can be successfully modulated only with low frequency – well below the 1/(ringing time). Considering that the ultrasound transducers are very resonating, the ringing time is too long, and the modulation frequency would be too low and rather impractical for a precise indoor positioning system. It is still possible but difficult to implement and impractical for technical and economic reasons
Question: OK. But why choose the resonating transducers in the first place? Why not use wideband “ultrasound speakers” or something?
Answer: Yes, it is possible to use a wideband ultrasound speaker to transmit ultrasound, which would simplify the system. However, such speakers typically produce significantly weaker ultrasound signals, thus limiting the range the system can operate. For example, Marvelmind Indoor Positioning System can comfortably work with the beacons up to 30 meters away. With Marvelmind Horns – up to 120m away.
Low efficiency, i.e., it would require significantly more energy to produce the same level of ultrasound signal as the resonating transducers. A
Question: But why not give the ultrasound speakers a lot of power and produce a strong ultrasound signal?
Answer: It is also possible. However, since the non-resonating wideband ultrasound speakers typically have low efficiency, it would require significantly more energy to produce the same ultrasound signal level than the resonating transducers. This means that the beacons with wideband speakers must always be powered from an external source, which would often become a limiting factor for such beacons.
Despite that, it is possible to build the system with low-efficiency wideband ultrasound speakers. In many cases, it could be a perfect option and an alternative providing a new layer of flexibility for building precise indoor positioning systems.
Question: So, how do different frequencies of beacons help?
Answer: If we can’t use modulation, we can separate different ultrasound signals in time or frequency.
Time division multiple access (TDMA) is more straightforward. That is the basis for NIA. No ultrasound signals are transmitted simultaneously within 50m or so of open space. The system is easy and robust, but with the growing number of mobile beacons that are emitting ultrasound, it becomes proportionally slower per mobile beacon, i.e., if the update rate per system is 16Hz, then the update for one mobile beacon will be 16Hz; for two mobile beacons = 16Hz/2=8Hz, for ten mobile beacons => 1.6Hz, etc. For many applications, it is too slow.
Also, in some cases, it is simply inconvenient to have emitting ultrasound mobile beacons, for example, on people, because the beacons produce, albeit quiet, still somewhat observable “tick” – a very short ultrasound pulse that people hear as a “tick”. People can’t hear ultrasound, but the ultrasound pulse has weak elements of acoustic frequencies that can be listened to that can disturb people, particularly in quiet areas. It is much better to have “ticking” beacons – ultrasound transmitting beacons 5-30m away, where the ticks are not even observed in practice.
But to distinguish between the simultaneously transmitted ultrasound signals, they must be on different frequencies.
It isn’t easy to filter the ultrasound signals that are close in frequency, and short pulses have a pretty broad transmitting spectrum. Thus, there is a practical limitation on how many ultrasound frequencies the system can have. But, in general, the more frequencies, the easier it is to build large maps consisting of dozens of submaps or to have a better performance of swarms of drones.
Marvelmind indoor positioning system supports eight ultrasound frequencies:
- 19kHz
- 22kHz
- 25kHz
- 28kHz
- 31kHz
- 34kHz
- 37kHz
- 45kHz
We discuss the practical differences between different ultrasound frequencies below and recommend which frequencies to choose for your beacons when ordering.
Other very quick hints
- Longest range required – up to 120m with the Horn in 1D? – choose 19kHz-25kHz
- High external acoustic noise and distances under 30 meters? – choose 31kHz-45kHz
- For the highest flexibility, obtain beacons with as many frequencies as available
Ultrasound transmitting frequency can't be changed by software
Remember, you can’t set the ultrasound frequency for transmission arbitrarily. The ultrasound transducers of the beacons define the ultrasound frequency of the beacon. Marvelmind Robotics produces specially customized ultrasound transducers for each ultrasound frequency we use in our beacons.
At the same time, Super-Beacons, as well as Industrial Super-Beacons and Mini-RXs and resulting products supporting IA, such as Helmets, Jackets, Badges, Caps, etc., can receive an ultrasound frequency or several of them or all of them at the same time, because the receiving microphones are wideband and digital filters of the beacons allow beacons to distinguish between different ultrasound frequencies.
So, to sum up:
- Transmitting ultrasound frequency is defined by the hardware and cannot be changed by software
- Receiving ultrasound frequency is defined by software and can easily be changed in Super-Beacons and other devices with digital filters. The users don’t have to do anything at all since the system selects the correct frequencies automatically
- More mature Beacons HW v4.9 have analog filters and simultaneously support only one receiving and transmitting frequency. But there are Beacons HW v4.9 available for 5 different frequencies (19kHz, 25kHz, 31kHz, 37kHz, 45kHz)
To choose the same or different ultrasound frequencies?
Answer:
In 95% of real-life use cases, choosing different ultrasound frequencies for your beacons when you are ordering is recommended because it gives you more freedom with your indoor positioning system.
The same ultrasound frequency of ultrasound beacons allows you to use only NIA. Beacons with different ultrasound frequencies will let you use NIA, IA, and MF NIA. Study more:
- Architectures comparison – basic explanation of Non-Inverse (NIA), Inverse (IA), and Multi-Frequency Non-Inverse architectures, their use cases, and differences between them
- Video: NIA vs. IA vs. MF NIA – how to choose?
When to choose the same ultrasound frequency for beacons?
There are several cases when you must choose the same ultrasound frequency or when selecting the same ultrasound frequency for your beacons is preferred or recommended. Then there are cases when it doesn’t really matter what frequency to choose, and some other factors may influence the final decision, for example, availability or price:
1) Choose the same frequency if you already have, let’s say, Beacons HW v4.9 on 31kHz and you run NIA and want to expand your system:
- Suppose you want to purchase more Beacons HW v4.9 to the existing system to cover a larger area, build more submaps, or track more mobile objects. In that case, you must use the same ultrasound frequency because Beacons HW v4.9 can’t receive different ultrasound frequencies simultaneously – their analog filters are not sharp enough, unlike the digital filters of Super-Beacons. So, if you already have 31kHz beacons, you must order new 31kHz Beacons HW v4.9
- By the way, the Beacons HW v4.9 are already NOT available in stock, and they won’t be produced anymore, but they are in an SW maintenance mode: we support them even in the new SW releases, but no new features are developed for them. The Beacons HW v4.9 are gradually substituted with Super-Beacons, which are more capable in nearly all aspects and are the main “workhorse” of Marvelmind Indoor “GPS”
2) You can add stationary Super-Beacons in NIA with any frequency as an expansion for your system based on Beacons HW v4.9 on 31kHz:
- If you want to expand your system built with 31-kHz Beacons HW 4.9, you can easily purchase Super-Beacons with any ultrasound frequency for your stationary beacons. Super-Beacons can receive any ultrasound frequency or all at the same time. Thus, you can comfortably have a mix of Beacons HW v4.9-31 and Super-Beacons of any frequency as stationary beacons. However, for the mobile beacons in this system, you still must use Super-Beacons-31kHz only because even Super-Beacons can emit only on their native transducers’ frequency. And if you already have Beacons HW v4.9 with 31kHz, then the new mobile Super-Beacons must be on 31kHz, while stationary Super-Beacons – on any frequency, since they listen to ultrasound – don’t emit the ultrasound in NIA
- By the way, the Beacons HW v4.9 are still available in stock, but they are in the SW maintenance mode: we do support them even in the new releases, but no new features are developed for them, and no new batches are produced anymore. The Beacons HW v4.9 are gradually substituted with Super-Beacons, which are more capable in nearly all aspects and are the main “workhorse” of Marvelmind Indoor “GPS”. The most attractive point of remaining Beacons HW v4.9 is their lower price
What are the impacting factors on different ultrasound frequencies?
There are several factors affecting the most optimal selection of the ultrasound frequency for the beacon:
- Desired range or size of the submap, i.e., the maximum reliably measured distance
- Level of typical wideband acoustic noise
- Accuracy of the positioning system
- Potential interference or acoustic noise from other sources, for example, narrowband or wideband impulse power supplies or luminescent lamps
Transmitting strength
- 25kHz
- 19kHz, 22kHz, 28kHz
- 31kHz, 34kHz
- 37kHz
- 45kHz
- High level of external acoustic noise – it will be lowest in 45kHz
- The 45kHz frequency theoretically provides the highest accuracy because the ultrasound wavelength is the shortest
Reception sensitivity
- 25kHz
- 19kHz, 22kHz, 28kHz
- 31kHz, 34kHz
- 37kHz
- 45kHz
- There is a peak of about 25kHz, i.e., the microphone is abnormally sensitive around this frequency. Similarly, it looks like the 25kHz transducers are simply the most powerful overall
- 19kHz – the frequency right below the peak
- 22kHz and 28kHz are around and above the peak
- 31kHz – starts already becoming weaker, but generally flat
- 34kHz, 37kHz, and 45kHz continue to be relatively flat but simply slightly less sensitive
Attenuation in the air with the distance due to absorbtion
That is simple: the lower the frequency – the lower the attenuation. It is generally recommended to have a lower frequency for the highest range. Though, it shall be remembered that other factors, primarily the external acoustic noise, may significantly impact the resulting signal-to-noise ratio.
Therefore, it is generally very much recommended to run practical tests on the factory floor, for example:
- To place the beacons face to face at a distance of 30-50m with a direct line of sight
- Measure the signal using the embedded oscilloscope with different ultrasound frequencies, i.e., using several beacons with different ultrasound frequencies, and compare the signal-to-noise ratio. See the examples below for more information
For more information, see:
- http://resource.npl.co.uk/acoustics/techguides/absorption/
- http://www.sengpielaudio.com/calculator-air.htm
For example, the formulas return for 19kHz the attenuation of ~0.5dB/m and for 45kHz – ~1.5dB/m, which gives ~30dB difference between the two frequencies on 30m. That is a lot! – more than 30 times in magnitude and 1000 times in power.
Surprisingly, we see a big difference between the frequencies in practice, but not as big. However, as discussed, there are many affecting factors (sensitivity, transmission efficiency, directivity, etc.)
What are the practical differences between different frequencies?
19kHz
- It has the lowest attenuation in the air among other frequencies we have. Thus, this frequency is recommended for very long submaps – up to 120m with the Horn
- Non-standard frequency – lower chances for external interference
- The only frequency that we have is, formally speaking, not ultrasound. The 19kHz frequency is still in the frequency range that people can hear (20-20,000Hz). This means that people may not only hear the pulses but hear the tone itself and find the pulses rather disturbing when they are closer than 2-3 meters from the beacon because of the very-very high pitch of the pulses – on the edge of hearing
- Not recommended in quiet areas like museums and similar
- Not recommended to be close to people
- It is the closest to the typical acoustic noise on the factory floor. Thus, the actual signal-to-noise ratio shall always be measured. The signal may be strong at a high distance because the attenuation in the air is low. But the external noise may be strong as well. Thus, the signal-to-noise ratio is not necessarily the strongest
22kHz
- Low absorption in the air, i.e. suitable for long-range and longest submaps
- Already not heard by people
- Strong transmission
- Slightly lower expected external noise than in 22kHz
- Non-standard frequency – lower chances for external interference
25kHz
- Overall the strongest transmission signal
- Low attenuation in the air – recommended for the largest submaps
- The very high sensitivity of microphones (equally sensitive to the external noise on this frequency as well)
- The 25kHz is a generic frequency, and there are other ultrasound devices on the market using this frequency. Thus, there could be a potential external narrowband interference because there could be other general devices like obstacle detection sensors in robots, for example
28kHz
- Still strong signal for transmission
- Reasonable attenuation in the air
- Non-standard frequency – lower chances for external interference
31kHz
- Our typical “default” frequency because it is in the middle of everything: still strong transmission, already weak external noise, still weaker attenuation in the air, etc.
- Still strong signal for transmission
- Reasonable attenuation in the air
- Non-standard frequency – lower chances for external interference
34kHz
- Overall – similar to 31kHz, but with slightly higher attenuation in the air and marginally lower external noise. Thus, the overall signal/noise ratio is about the same – depending on the color of the noise and distances in the submap
- Non-standard frequency – lower chances for external interference
37kHz
- Noticeably weaker signal, particularly on the distance
- Lower external noise, i.e., which is excellent for external-noise-limited systems – not strength of the signal-limited systems
- Shorter wavelength. Potentially higher accuracy
45kHz
- The lowest level of external noise – very suitable for noisy applications
- Potential the highest accuracy because the shortest wavelength of the ultrasound signal
- The highest attenuation in the air – not recommended for larger submaps
- Possible interference from other external systems that work on 42kHz or 44kHz
Does the ultrasound impact people and animals?
Practice shows that while people can hear quiet ticks produced by ultrasound transmitting beacons in quiet rooms, animals, even those that potentially can hear ultrasound, pay no attention to it. At least, their behavior doesn’t change at all.
We believe the short (0.5-1.5ms) ultrasound pulses coming with ~8Hz rate from the ultrasound transmitting beacons are heard by the animals as just loud ticks, but nothing more. Similar to what people can hear, but louder. However, the animals remain indifferent to whether there are beacons in their vicinity.
Though the beacons operate in ultrasound, which humans do not hear, the beacons emit very short pulses. Thus the average transmitting signal or the level of ultrasound noise is about 1/1000 of the peak level; we recommend keeping ultrasound transmitting beacons at least 2-3 meters away from people to minimize even the slightest probability of a potential impact of long-term exposure to ultrasound.
Since the ultrasound signal is easily blocked, the ultrasound signal from beacons behind a wall, a door, or even a sheet of paper, is most likely completely blocked. This is why we pay so much attention to the importance of a direct line of sight for precise tracking. The 2-3m recommendation is valid only for ultrasound transmitting beacons with a direct line of sight to people’s ears.