기술
Marvelmind 기술 개요
센티미터 정밀도의 Marvelmind 실내 측위 시스템의 핵심 기술을 살펴보세요: 초음파 기반 RTLS, 시스템 아키텍처, 실제 산업용 로봇, 지게차, 드론 및 사람 추적을 위한 엔지니어링 가이드. 이 페이지를 Marvelmind의 작동 원리와 다른 RTLS 기술과의 비교에 관한 모든 기술 문서의 시작점으로 활용하세요.
기술 상담 요청 ↗
귀사의 창고, 공장, 터널 또는 연구실에 관해 Marvelmind 엔지니어와 직접 상담하세요.
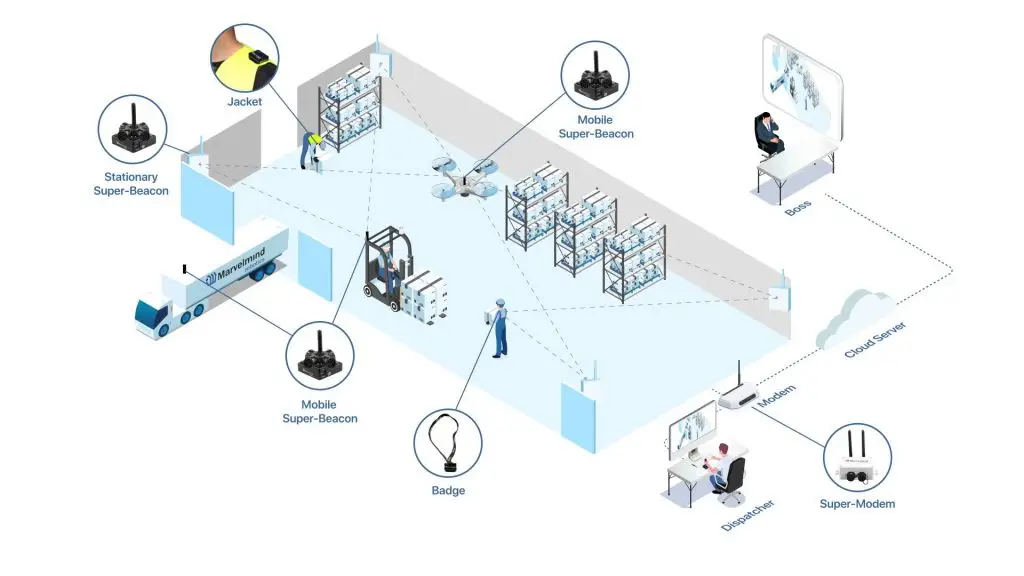
Marvelmind 초음파 기반 RTLS는 고정형 및 이동형 비콘, 동기화된 모뎀, 정밀 실내 측위를 위한 소프트웨어를 결합합니다.
핵심 기술 문서
Marvelmind가 UWB보다 정밀한 이유와 시스템의 구축 및 배포 방법을 이해하기 위해 다음 기초 문서부터 시작하세요.기초 원리
산업용 실내 측위에서 초음파가 UWB보다 우수한 이유
초음파 비행시간(Time-of-Flight) 방식이 최대 ±2cm 정확도를 제공하는 물리적 원리와, 금속 구조물이 많고 RF 노이즈가 심한 산업 환경에서 UWB보다 강인한 이유를 설명합니다.아키텍처
Marvelmind 실내 측위 시스템의 작동 원리
시스템 구성 요소, 지원되는 아키텍처(IA, NIA, MF-NIA), 설치 규칙, 서브맵, 대형 창고·공장·터널을 위한 확장 옵션에 대한 상세 개요.시장 현실