テクノロジー
Marvelmind テクノロジー概要
Marvelmindのセンチメートル精度屋内測位システムを支えるコア技術をご紹介します:超音波ベースの RTLS、システムアーキテクチャ、そして実際の産業用ロボット、フォークリフト、ドローン、人物追跡のためのエンジニアリングガイド。 このページを、Marvelmindの仕組みや他の RTLS 技術との比較に関するすべての技術記事へのエントリーポイントとしてご活用ください。
技術コンサルテーションを依頼する ↗
お客様の倉庫、工場、トンネル、または研究室の具体的なご要件について、Marvelmindのエンジニアに直接ご相談ください。
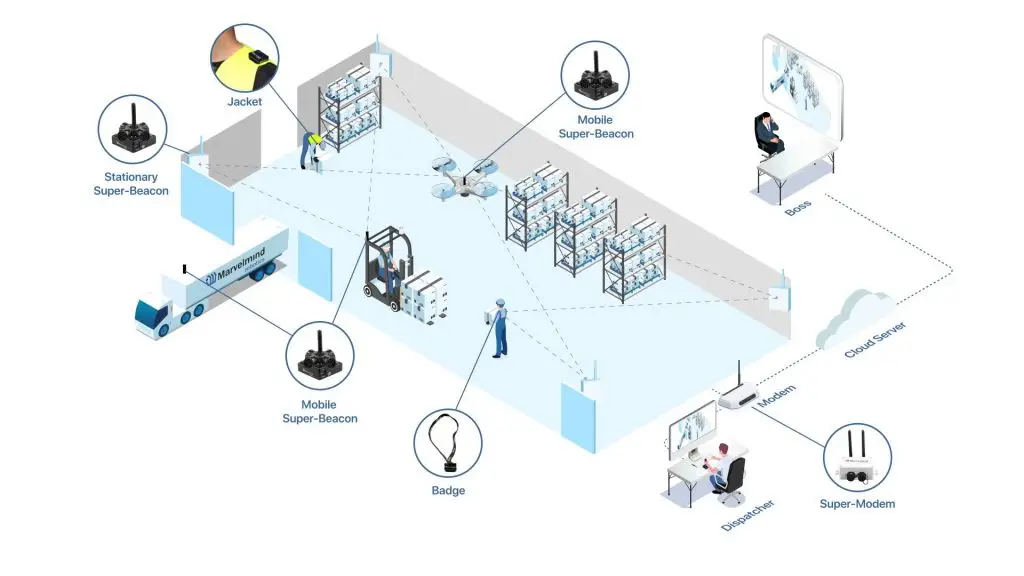
Marvelmindの超音波ベース RTLS は、固定ビーコンとモバイルビーコン、同期モデム、そして高精度屋内測位のためのソフトウェアを組み合わせています。
コア技術記事
Marvelmindが UWB よりも高精度である理由と、システムの構築および導入方法を理解するために、これらの基礎記事からお読みください。基礎知識
産業用屋内測位において超音波が UWB を凌駕する理由
超音波の飛行時間(Time-of-Flight)が最大 ±2 cm の精度を実現できる物理的な根拠と、金属が多くRFノイズの多い産業環境において UWB よりも堅牢である理由を解説します。アーキテクチャ
Marvelmind 屋内測位システムの仕組み
システムコンポーネント、対応アーキテクチャ(IA、NIA、MF-NIA)、設置ルール、サブマップ、大規模倉庫・工場・トンネル向けのスケーリングオプションについて詳しく解説します。業界の実態