Home » Handover types
Handover types
How to choose the most optimal for your case?
What is the handover?
The handover is a process of handing over the tracking from one submap to another in large indoor positioning systems.
Learn more about maps, submaps, service zones, handovers:
- Basics about submaps, service zones, and handover zones – video intro to building large maps consisting of many submaps
- Building submaps (PDF, Video Part 1, Video Part 2) – detailed practical guidance on building large maps consisting of multiple submaps
Let’s discuss the basics of handovers based on the map consisting of two submaps: Submap 1 comprised of the Beacons 2 and 3, and the Submap 2 comprised of the Beacons 3 and 4. See the sketch below:
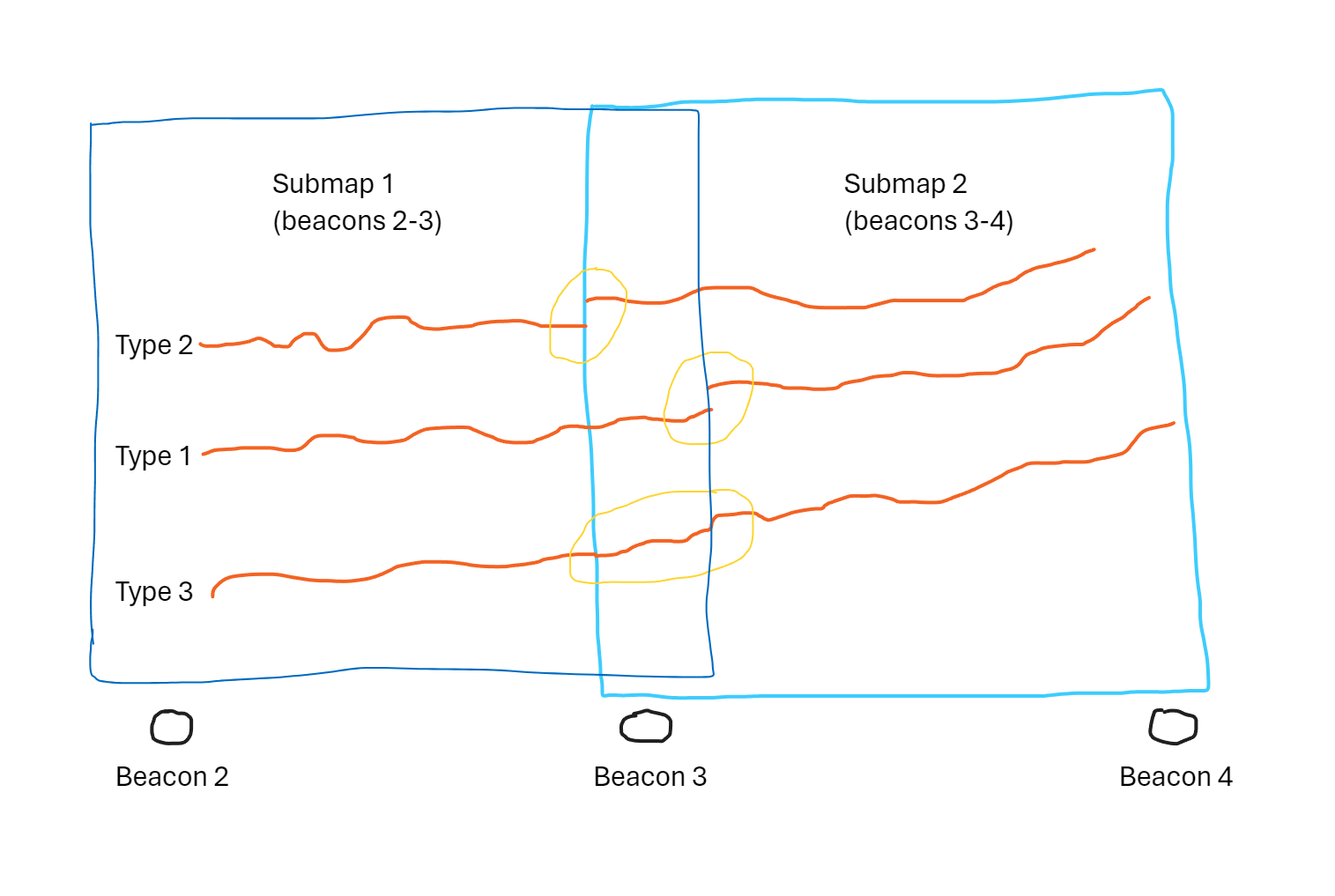
- Beacon 3 belongs to both submaps
- Blue and light-blue rectangles – service zones for corresponding submaps
Types of soft handovers
Type I
- In this handover type, the location data is obtained from the “old” submap/service zone as long as possible
- Only when the “old” service zone is over, the tracking continues in the “new” submap/service zone
- The handover is soft but not very soft because there is a jump since the submaps are always slightly misaligned
- Another, more important part is that when the handover happens, we only hope there is a good tracking in the “new” service zone, but until we hand over there, we don’t know. But when we hand over, it may be already too late
- We still couldn’t extend the tracking anyway, if there is no proper tracking in the “new” submap/service zone for whatever reason. However, we could prepare ourselves somehow, if we knew that before the handover happens
Type II
- In this handover type, the location data is obtained from the “old” submap/service zone as long as possible
- Only when the “old” service zone is over, the tracking continues in the “new” submap/service zone
- The handover is soft but not very soft because there is a jump since the submaps are always slightly misaligned
- Another, more important part is that when the handover happens, we only hope there is a good tracking in the “new” service zone, but until we hand over there, we don’t know. But when we hand over, it may be already too late
- We still couldn’t extend the tracking anyway, if there is no proper tracking in the “new” submap/service zone for whatever reason. However, we could prepare ourselves somehow, if we knew that before the handover happens
Type III
- In this handover type, the location data is obtained from the “old” submap/service zone and mixed with the location data from the “new” submap. It is a weighed mixing. Thus, the handover is always smooth even if the submaps are not well-aligned
- This a true soft handovers. Type I and Type II handovers are not hard handovers in our definitions, but the system may try to handover when there is nowhere to handover in Type I or II. In Type III, it is possible to warn the user before the handover, because this knowledge is already available in the handover zone but not used by the handovers Type I and Type II. It is not used by the Type III either but can be
Why do we need submaps at all? Why can't we have one large map?
It is possible, in theory, to have one large map and not to split it into submaps. We even practiced it many years ago. However, the tracking won’t be as good as with submaps. For example:
- One stationary beacon B2 – from the far – will report a distance L1 to the mobile beacon Mx
- Another group of stationary beacons (B3-B6) – much closer to the beacon Mx – will report other distances and coordinates that conflict with the data from B2
- Whom to trust? How to interpret the conflicting data?
Many of these issues are solved automatically when submaps with service zones are introduced, because:
- We typically know what stationary beacons have the line of sight where
- We may define the service zones so that hint or even directly command to the system whom to listen where, thus, eliminating “minority reports” that can be misleading
In very short: submaps with service zones:
- Simplify the building large and very large maps
- Make the process more controllable and predictable
- Provide more robust tracking at the same time
However, we need to handle handovers.
Hard handovers vs. soft handovers
In our terminology:
Soft handovers:
- Handovers Type I/II/III – when the system is handing over from one known submap to another known submap in a handover zone
Hard handover:
- It is a process of acquiring an initial location in a large map consisting of multiple submaps
- It is formally speaking not a handover at all because it is handing over from nowhere to somewhere
- It may take longer because there could be many submaps with the same combinations of ultrasound frequencies
- To make the submaps truly unique, it is possible to use TDMA. Thus, there will be know submaps with the same combination of TDMA+ultrasound frequencies. However, employing TDMA always drops the location update, which may be undesirable
- Hard handovers are more computentionally intensive for the system and require more data that takes time to acquire. However, since the mobile beacon is moving, it is possible that when the data available and calculated, the mobile object moved to a new area already. Thus, a part of the data was taken from one submap, another part – from another submap, and the total hard handover is simply wrong – the initial location is determined wrongly. The hard handover must start again. If the object moves too fast relative to the location update rate and never stops, it may happen than the hard handover is never complete. It is possible in theory but rarely happens in practice
Summary
- There are several types of handovers. It is very important to clearly understand the terminology to build the larger maps with the best results
- Handover Type III are better in 95% of cases than the handovers Type I or Type II
- Soft handovers are more robust and more successful in theory than hard handovers
- Soft handovers are faster than hard handovers because they are simpler for the system