







The Starter Set Super-MP-3D is designed for precise (±2cm) indoor positioning and navigation. The set is perfect for production automation, warehouse automation, safety, and productivity; for people and vehicle tracking, building geo-fencing zones, and tracking inside of them.
It can be used for autonomous indoor navigation of mobile robots, vehicles, and drones; for industrial applications, for example, forklifts or people tracking in a warehouse for safety and productivity.
The starter set is a multi-purpose (MP) set based on Super-Beacons. A particular focus of the set is on the accuracy of positioning. The set can provide a typical accuracy of ±2cm even before additional sensor fusion or filtering.
This level of accuracy is about ten times higher than what ultra-wideband (UWB) provides and about 100 times higher than it can be provided by BLE (iBeacon) based systems.
All base software is already included in the set’s price. You can simply download it.
Starter Set Super-MP is the most versatile (see supported architectures below) and the easiest to set up and deploy (no need for manual distances measurement or calibration) set available today (Mar.2023).
By default, the Starter Set Super-MP-3D supports NIA and IA (https://marvelmind.com/pics/architectures_comparison.pdf):
- 1D – up to 4 mobile beacons
- 2D – up to 4 submaps, including fully overlapping submaps and 2N beacon redundancy for optimal tracking
- 3D – up to 1 submap with N+1 beacon redundancy
With additional licenses, Starter Set Super-MP-3D can support:
- Multi-Frequency (MF) NIA in 3D with N+1 beacon redundancy
- Multi-Frequency (MF) NIA in 2D with N+1 beacon redundancy
- MMSW0004: MF NIA support
Content:
- 4 x Stationary Super-Beacons ( with different ultrasound frequencies)
- 1 x Mobile Super-Beacon (identical to the stationary Super-Beacons, but typically on another ultrasound frequency)
- 1 x Modem HW v5.1 supporting up to 250 beacons
Notice that stationary Super-Beacons must be on different frequencies to support IA and MF NIA (see more about different architectures); Typically, we supply five different frequencies. Sometimes – 4 different frequencies when there is a shortage of one or more. Even four different frequencies do not limit users because one of the Super-Beacons must be mobile. In this case, it doesn’t matter what transducers it has – on which frequency – because it will receive the ultrasound. And Super-Beacons can receive any frequency because the frequency is chosen based on the digital filter. But the transmitting frequency is defined by the properties of the transducer and cannot be changed.
We equip the sets with beacons with different frequencies from the available ones: 19kHz, 22kHz, 25kHz, 28kHz, 31kHz, 34kHz, 37kHz, and 45kHz. Unless you request some frequencies, we will select them based on our preferences.
The Multi-Frequency NIA allows having up to 8 times update rate increase
for multiple mobile beacons without location update rate reduction
inherent to regular NIA with multiple mobile beacons (“hedges”) – 8
different ultrasound frequencies are available totally. Check more about
different architectures: Architectures comparison.
Read more about the ultrasound frequency selection.
If you want to get additional Super-Beacons to your Starter Set Super-MP, get as many different ultrasound frequencies as available. It will give the maximum flexibility for your configurations in IA, MF NIA, and even NIA.
IMU:
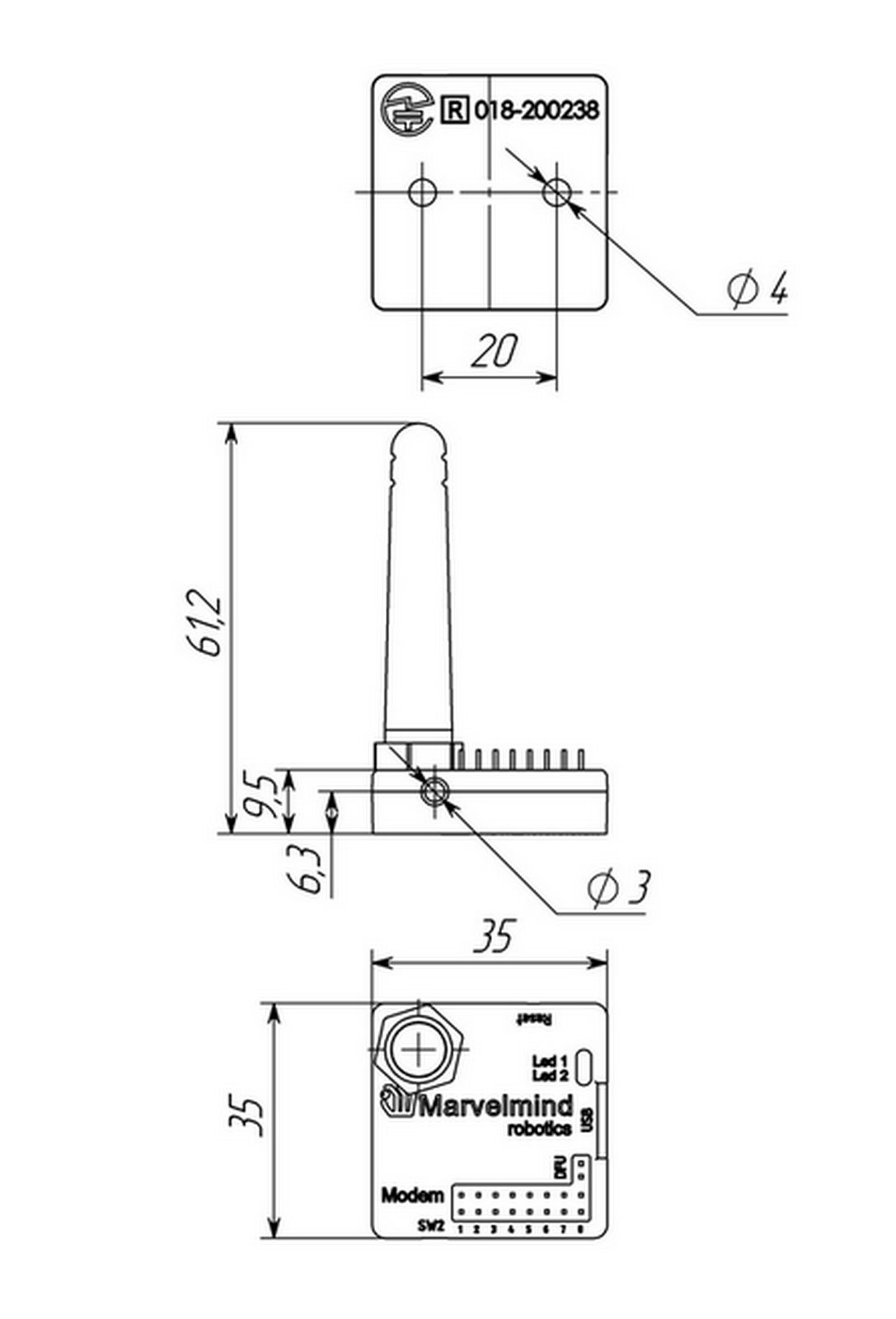
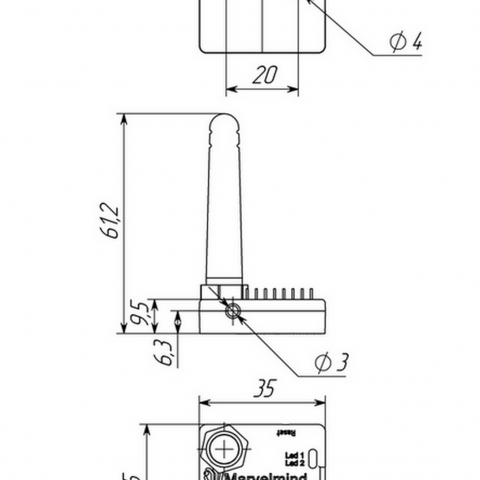
All beacons (stationary and mobile) have 6D IMU (3D accelerometer + 3D gyroscope) and standard 50mm antennas. Effectively, you get five similar Super-Beacons on different ultrasonic frequencies and a modem.
Radio connectivity:
The HW of the system supports two bands:
- License-free ISM band (915 MHz) for the US and countries in Region 2 (https://en.wikipedia.org/wiki/ITU_Region)
- License-free SRD band (868 MHz) for the EU and other countries: (https://en.wikipedia.org/wiki/Short-range_device#SRD860)
We always recommend checking your country’s local regulations.
SW:
All essential SW, as well as Marvelmind Dashboard API, are already included in the price. Just download the Marvelmind SW pack.
Comparison with other beacons:
Super-Beacons are a newer version of Beacons HW v4.9 and superior to them in nearly all aspects:
- Super-Beacons have sharp DSP filters (the same is valid for Mini-RXs or Industrial Super-Beacons). The Super-Beacons are more sensitive and more interference-resistant than Beacons HW v4.9 that rely on analog filters
- Super-Beacons have improved TX part and power-saving features that allow up to 10x battery lifetime improvement over Beacons HW v4.9 (depending on the settings and update rate)
- Super-Beacons, as well as Mini-RX and Industrial Super-Beacons, use a single wide-beam microphone for receiving ultrasound, thus making submaps in complex conditions (more considerable distances, for example, or noisy environments) much easier to build than that with Beacons HW v4.9 because the microphone is always on and it has a wide reception diagram. Whereas, with Beacons HW v4.9 in those challenging conditions, one would need to turn off some sensors and, generally speaking, take care of the number of sensors (RX1-RX5) turned on to provide proper coverage, on the one hand, and to maintain the appropriate sensitivity on the other
- All Super-Beacons have 6D IMU (3D accelerometer and 3D gyroscope)
Super-Beacons are better than Mini-RXs and Mini-TXs as well:
- Super-Beacons are dual-use: they can both receive and transmit ultrasound. You can freely use them as stationary and as mobile
- Super-Beacons have external pins (UART, SPI, reset, etc.)
- Super-Beacons have an external antenna for a more extended radio range and larger maps
- Super-Beacons have internal batteries with higher capacity
Marvelmind indoor positioning system is an off-the-shelf indoor positioning and navigation system that provides precise (±2cm) location data to autonomous robots, vehicles, AGVs, and drones. It can also be used to track other objects with a mobile beacon installed on them, such as forklifts in warehouses or virtual reality (VR) helmets or helmets for construction workers or miners.
The navigation system is based on stationary ultrasonic beacons united by a radio interface in a license-free band (915/868 MHz ). The location of a mobile beacon is calculated based on the propagation delay of an ultrasonic signal (Time-Of-Flight or TOF) to a set of stationary ultrasonic beacons using trilateration. See more about the available architectures.
No manual calibration is required. No need to know the exact locations of the beacons – the system automatically builds the map of beacons.
The set contains beacons with IMU, which allows ultrasonic + IMU (3D accelerometer + 3D gyro) sensor fusion. That allows a much faster update rate – up to 100Hz and above.
The critical requirements for the proper system functionality:
- For 3D (X, Y, Z) tracking – An unobstructed sight by a mobile beacon of three or more stationary beacons simultaneously within 30 meters
- For 2D (X, Y) tracking – An unobstructed sight by a mobile beacon of two stationary or more stationary beacons simultaneously within 30 meters
- In ideal (noiseless) conditions and with lower frequencies, the maximum distance can be up to 50 meters – not recommended, but possible
- All Super-Beacons have 6D IMU onboard
- See more about the line-of-sight requirement