Local positioning system for archaeology
Though the Marvelmind Indoor Positioning System (IPS) is mainly designed for industrial applications, it is used for a large variety of applications. As it turned out, including archaeology.
We came across an article that provided a detailed explanation of how Marvelmind IPS was used to collect 3D point data. Thus, the approach is useful not only for archaeology but for any application where 3D point data collection is required.
Original article and podcast: "A New Technology for Point Data Collection?"
Podcast: “On Hedgehogs and Marvelous Minds: A New Technology for Point Data Collection? – Ep 179“
“The research in the article we discuss used an indoor positioning system (IPS) to map an outdoor site in Israel. Their results are encouraging for this emerging technology.”
Original article: “On Hedgehogs and Marvelous Minds: A New Technology for Point Data Collection?” (PDF).
Published online by Cambridge University Press: 20 October 2021.
“The collection of 3D point data is a common bottleneck for archaeological excavations despite an increasing range of powerful spatial data collection technologies. Total stations often require a dedicated operator, and they are optimal for excavation-level data collection over relatively short line-of-site distances. Precision Global Navigation Satellite Systems (GNSS) require reliable communication with constellations of distant satellites and may not be accurate enough for all data recording contexts. A new category of spatial data collection hardware, called Indoor Positioning Systems (IPS), or “indoor GPS,” has the potential to provide a more cost-effective and efficient approach to the collection of point data during excavations by making 3D point data collection widely available and accessible.
Additionally, such systems may allow greater detail in digital field data recording by enabling the collection of shape data via continuous recording. In this article, we present one such IPS system—the Marvelmind IPS—discuss its potential value and limitations, and provide a case study of a field test of the system at the Chalcolithic (4600–3600 BC) site of Horvat Duvshan, Israel.”
Local copy of article: "A New Technology for Point Data Collection?"
Local copy of article: “On Hedgehogs and Marvelous Minds: A New Technology for Point Data Collection?“
“The collection of 3D point data is a common bottleneck for archaeological excavations despite an increasing range of powerful spatial data collection technologies. Total stations often require a dedicated operator, and they are optimal for excavation-level data collection over relatively short line-of-site distances. Precision Global Navigation Satellite Systems (GNSS) require reliable communication with constellations of distant satellites and may not be accurate enough for all data recording contexts. A new category of spatial data collection hardware, called Indoor Positioning Systems (IPS), or “indoor GPS,” has the potential to provide a more cost-effective and efficient approach to the collection of point data during excavations by making 3D point data collection widely available and accessible.
Additionally, such systems may allow greater detail in digital field data recording by enabling the collection of shape data via continuous recording. In this article, we present one such IPS system—the Marvelmind IPS—discuss its potential value and limitations, and provide a case study of a field test of the system at the Chalcolithic (4600–3600 BC) site of Horvat Duvshan, Israel.”
Key features of Marvelmind IPS technology according to the article
NMEA coordinates and geo-referencing
“They provide ±2 cm accuracy out of the box, and they can output a standard NMEA data stream (a widely used GNSS/GPS data standard) over USB, which can be parsed by many third-party software suites and hardware systems.
The Marvelmind system can be georeferenced so that the NMEA data output provides real-world or local coordinates in real time.”
“One of the main features of the Marvelmind system that makes it so appealing for incorporating into data collection is this ability to “pretend” to be a GNSS system by outputting a standard NMEA positioning stream. Many apps, software packages, and even third-party hardware are built to utilize this type of dataflow. Passing this data to QGIS running on a Windows-based tablet is one such option, but there are many other potential workflows on different fieldwork devices (such as iOS or Android tablets, or even traditional data collectors). However, many archaeological projects rely on arbitrary, local coordinate systems that can be difficult to reconcile with the “mock” GNSS data that is being produced by the Marvelmind system in the process described above. For projects where it is already difficult to reconcile GNSS data with local coordinate data, this may not be the best option. It might be possible to configure the system to operate directly in a local grid system, but setting up the link between the hedgehog and the data recording would be more difficult and is beyond the scope of this article”.
Marvelmind Robotics’ comments: That is right. Marvelmind Indoor “GPS” supports multiple physical interfaces (UART, virtual UART over USB, UDP over WiFi). The location data can be obtained from the mobile beacon (“hedgehog” or “hedge”) and from the modem. Here is the Protocol description.
- Yes, we do stream data in the native GPS format – NMEA0183 – thus, other systems see our output as a regular GPS receiver’s output. That makes the integration very easy – no integration is required.
- We do support other formats as well. Thus, if you need a conversion, let us know via info@marvelmind.com and we will provide you with a conversion in your data format.
Stationary beacons, mobile beacons and modem - basic setup
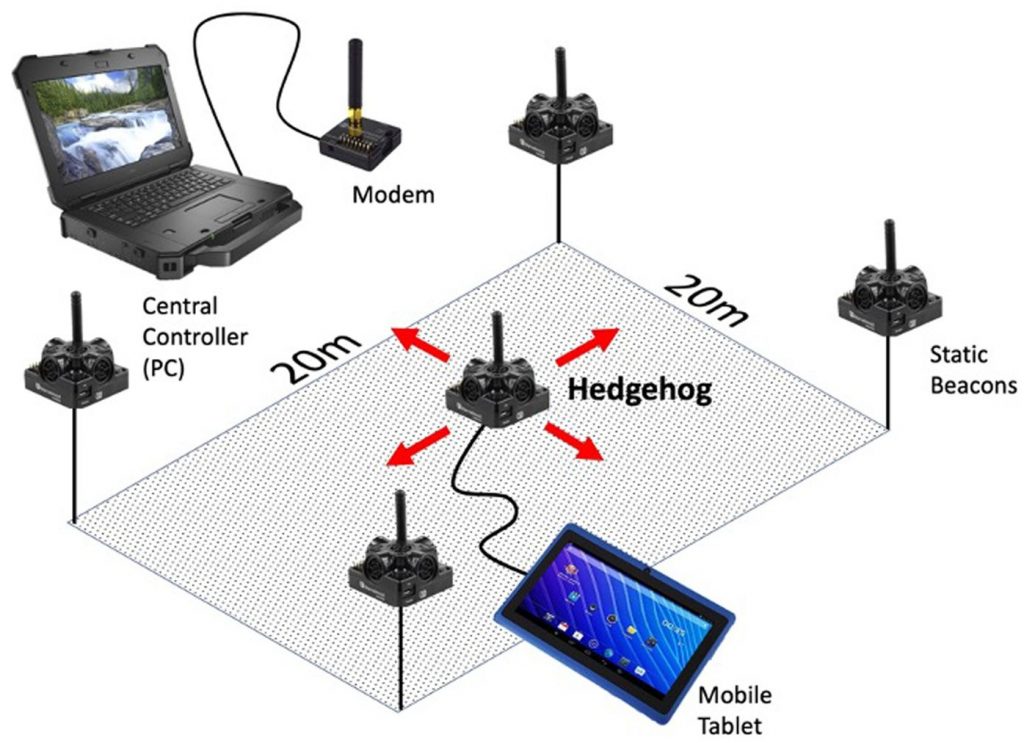
“The Marvelmind IPS system uses a series of static beacons (a minimum of four for 3D positioning) placed around the area to be measured. Each beacon can send and receive a continuous stream of ultrasonic signals used for ranging. A radio modem connected to a PC acts as a central controller for the system, and then at least one beacon operates as a rover (called a “hedgehog” in the Marvelmind nomenclature).
Each hedgehog receives the signals from all of the static beacons and sends this information to the central PC (Figure 2). The PC performs trilateration calculations to find the position of the hedgehog and then sends that information back to the hedgehog, which outputs this positioning data over USB to a tablet. The effective range for each beacon is 30 m, so each set of four beacons is limited to an area smaller than 30 × 30 m (Figure 3). The Marvelmind system is, however, highly scalable, given that additional static beacons (up to 250 per modem) can be added to the system to extend the range over larger and larger areas. These areas do not need to be contiguous. Additionally, although Marvelmind lists the out-of-the-box accuracy as ±2 cm, it is possible to configure the system to provide >1 cm accuracy by reducing the update rate below 8 Hz.”
Marvelmind Robotics’ comments: A few corrections:
- The Marvelmind indoor positioning system supports three architectures: NIA, IA and MF NIA. See more: Architectures comparison – basic explanation of Non-Inverse and Inverse architectures, their use cases and differences between them. Therefore, in NIA, the mobile beacon is emitting ultrasound and stationary beacons are receiving. In IA, the stationary beacons are emitting ultrasound on different frequencies and the mobile beacons are receiving the ultrasound pulses.
- PC is not doing any calculations. PC runs the Dashboard – the controlling and monitoring SW. However, all calculations are done inside the system – spread between mobile beacons, stationary beacons and the modem. Thus, if the system is already up and running the map of stationary beacons is frozen, the PC is simply not needed. The user can get the location data through the interfaces in the user’s GUI. No Marvelmind Dashboard or PC is required
- In order to get higher accuracy and successfully combat noise or inaccuracy increases due to wind, it is recommended to not reduce the update rate, but increase averaging – to enable the Realtime Player. The location data latency or effective update rate will be reduced from the typical 8Hz and 1/8 sec latency by a factor of 4-36, depending on what averaging is chosen. As a result, the accuracy or, better to say, the noise of the measurements will be reduced as a square root of 4-36, i.e. can easily be 2-6 better than the default ±2 cm and reach sub-cm
- See more about accuracy: How to increase the accuracy of a precise indoor positioning system
How to properly use Marvelmind Indoor "GPS" for archaeology
Our comments and advice on some of the topics raised in the article in order to achieve the highest performance using Marvelmind Indoor “GPS”
How to combat wind
“This system does have some practical limitations that constrain functionality for archaeological field applications. This hardware is, as the term “indoor GPS” denotes, not primarily developed for outdoor work. One important drawback is the effect of wind on ultrasonic measurement. Although the system uses filters to reduce errors, winds that are strong enough will affect the accuracy of the system (Jimenez et al. 2019). Marvelmind asserts that errors due to wind are negligible at distances under 10–20 m and are only likely to affect further distances when winds are loud enough to be audible to humans. In practice, in the field, we noticed that the hedgehog position could begin to wander—from centimeters to tens of centimeters—at moderate wind speeds, particularly when it was gusty. This could definitely limit the practicality of relying on this technology in places where significant wind is a daily environmental condition, and it will require further testing.”
Marvelmind Robotics’ comments and advice:
- Marvelmind indoor positioning system is indeed designed for indoor, where the wind is not present or not affecting. However, it is possible to successfully combat for outdoor, particularly, for slow-moving or semi-static measurements like the one in archaeology
- Using more averaging can help significantly reduce impact of wind. See more: How to increase accuracy of precise indoor positioning system
- For very special cases when wind is blowing constantly in one direction – not a noise impact on measurement, but real shift due to the constant wind, contact us directly. We will be able to add special settings to compensate that, because it is possible to make distance measurements in both direction, i.e. along the wind and against the wind, and take this into account, thus, effectively nearly eliminate any constant distance shift. The noise impact – the same basic solution – more averaging
Comparison with other indoor positioning systems
“Although the Marvelmind system was chosen for this test, based on the features described above, other systems may be fruitful for investigation and testing as well. The systems offered by Pozyx, for instance, have similar cost and accuracy claims. Their “Creator” system is aimed at hobbyists and will connect with common, low-cost Arduino or Raspberry Pi systems. Although this system does not, currently, seem to be able to output data in an NMEA stream the way the Marvelmind system does, experiments with coupling accurate GNSS data with Pozyx positioning data seem promising (Di Pietra et al. 2020). Similarly, a recent article by Almeida-Warren and colleagues (2021) investigates the archaeological utility of a related kind of low-cost device—the DistoX2—which couples a laser rangefinder fitted with a compass and clinometer, and it offers an additional alternative technological solution for environments where total stations and GNSS are not practical”.
Marvelmind Robotics’ comments and advice:
- UWB-based systems are good and, for example, not affected by wind, which is a clear advantage, if the wind is a problem. However, of course, Marvelmind Indoor Positioning System is simply 10 times more accurate than UWB due to the underlying physics of used technology: time of flight of radio (UWB) vs. time of flight of ultrasound (Marvelmind Indoor “GPS”)
Marvelmind Robotics’ comments and advises:
- Indoor navigation & positioning (PDF) – review and comparison of industrial indoor positioning technologies and methods
- Indoor navigation & positioning (YouTube video) – video based on the PDF above with additional insights
On GUI and overall software development
“However, because Marvelmind has a relatively small user base and this use case is at the margin of the current functionality of the system, it was difficult to get the coordinate set permanently to orient the grid to local north and to tune the system so that measured coordinates with the hedgehog would match UTM coordinates recorded with our GNSS equipment. At the time of the pilot test in 2019, this georeferencing was difficult to figure out from the user manual, and there was relatively little in the way of online discussions of this issue. The graphical user interface (GUI) for setting up the system, using the proprietary Marvelmind “Dashboard” software, often seemed counterintuitive or difficult to set up persistently.
However, by late 2020—and after several firmware updates—some of these issues seem to be resolved. It is hoped that this will make the system easier to deploy in the future. Alternatively, it might be possible to accept an error in the georeferencing of the system and correct it through postprocessing, although this would be a less elegant solution”.
Marvelmind Robotics’ comments and advice:
- Since we are so much driven by customer requests and we customers in so different areas – from autonomous robots and drones to sports and from artificial autonomous swans to archaeology, we develop SW a lot and update the SW several times per year
- If anything is contra-intuitive or simply doesn’t work, just drop us an email to info@marvelmind.com and we will quickly fix it or explain how to use it properly
- Regular Help channels
- Download the latest SW, the latest Operating Manual and other help files