How indoor positioning systems work
There are many types of indoor positioning systems (IPS). Some people refer to them as indoor navigation systems (INS). The systems are also called Realtime Locating Systems (RTLS), a broader term than just indoor systems – RTLS can be outdoor – but RTLS typically refers to IPS and INS.
Why do people need an indoor positioning system? GPS does not work indoors because intentionally weak GPS radio signals cannot penetrate buildings made of metal, concrete, or brick, and the accuracy of typical GPS (5-10 meters) is not sufficient for indoor applications. Thus, indoor positioning systems are required. They work indoors, and they are typically more precise than GPS.
The vast majority of indoor positioning systems that work effectively rely on stationary beacons (anchors) that act as satellites in GPS, and mobile beacons (tags) that measure their position against these stationary beacons. It shall be clear that mobile beacons position themselves or the IPS position them against the stationary beacons distributed in the building, not against the building itself.
There are systems, for example, based on the Earth’s magnetic field. They don’t need beacons. But such systems didn’t prove themselves robust enough and precise enough for practical industrial applications. Thus, most working indoor positioning and navigation systems today use stationary beacons. The underlying technologies and architectures may differ drastically (for example, time-of-flight vs. RSSI (radio signal strength)), but the majority of those systems are beacon-based.
GPS is a Global Positioning System from the US. Like its siblings, GLONASS (Russia), Galileo (EU), BeiDou (China), and other lesser-known systems from Japan and India, it is a Global Navigation Satellite System (GNSS) that relies on satellites. Satellites determine their precise position based on data from ground stations. The satellites have atomic clocks. Based on the translated position of the satellites and precise clock stamps from the satellites, the mobile beacons can calculate their position using trilateration. But the key to the technology for the system is direct visibility to the satellites, which is usually not the case indoors.
A few quick words about technologies. Among the most popular today are the following:
- UWB
- BLE
- WiFi
- Ultrasound
- etc.
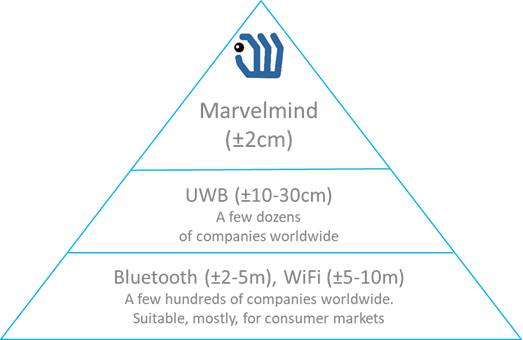
Since we are focusing on industrial applications (robotics, drones, forklifts, vehicles, humans, cranes, and other machines) where accuracy does matter, far less accurate solutions, for example, BLE or WiFi, are touched only briefly and left for retail, airports, museums and similar applications, where it is sufficient to reach a particular gate or a room but not much more than that.




Terminology
- AoA – Angle of Arrival (BLE)
- AoD – Angle of Departure (BLE)
- AR – Augmented Reality
- BLE – Bluetooth Low Energy
- GNSS – Global Navigation Satellite System
- GPS – Global Positioning System
- IA – Inverse Architecture (Marvelmind)
- IP67 – Ingress Protection
- IPS – Indoor Positioning System
- IMU – Inertial Measurement Unit
- LIDAR – Light Detection and Ranging
- LoRa – proprietary radio modulation
- LoS – Line-of-sight
- MEMS – Micro-Electro-Mechanical Systems
- NIA – Non-Inverse Architecture (Marvelmind)
- Non-LoS – Non-line-of-sight
- RSSI – Received Signal Strength Indicator
- RTLS – Real-time Locating Systems
- TDoA – Time Difference of Arrival
- TDMA – Time Division Multiple Access
- ToA – Time of Arrival
- UWB – Ultra Wideband
- VR – Virtual Reality
- ZigBee – Wireless mesh network standard
Types of indoor positioning methods
Trilateration – time of flight
- GPS (radio)
- UWB (wideband radio)
- Marvelmind Robotics’ Indoor “GPS” (ultrasound)
RSSI-based
- BLE (Bluetooth Low Energy)
- WiFi
- ZigBee
- LoRa
Triangulation
- LIDARs
Mixed
- BLE + angle of arrival (AoA)
- BLE + angle of departure (AoD)
Odometry
Inertial
- Inexpensive MEMS IMU vs. laser-based IMU
Optical
- QR codes
- Stargazers
- Optical flow
- Motion capture
Sensor fusion
- IMU+ultrasonic
- Drift vs. jumps
- Location update rate
Other types and exotic
- Li-Fi
- RFID
- Magnetic
No method or indoor positioning system is good for all
Many contradicting requirements. Users must choose:
- Accuracy
- Update on request vs. 100-400Hz for VR/AR
- IP67 and Ex requirements
- Price and total cost of ownership
- Power consumption and battery lifetime of stationary beacons
- Power consumption and battery lifetime of mobile beacons
- Weight
- Size
- Tolerance to particular types of interference (radio, light, sound)
- Location only vs. Location+Direction
- Embedded IMU
- Data communication to and from mobile beacons
- Capacity
- Flexibility