Home » Tracking in narrow aisles
Tracking in narrow aisles
Special indoor tracking cases require special attention

Tracking in narrow aisles is as common as it is non-trivial:
- Effectively, you no longer have a 2D tracking. It is a 1D tracking (along the aisle), or a 1.5D tracking (along the aisle and left or right shelf), or a 2.5D tracking (along the aisle, left or right shelf, and layers of the shelves – Z coordinate)
- See the video below. As long as you come closer and closer to the line connecting the stationary beacons, i.e., your aisles become narrower and narrower, your Y-coordinate accuracy becomes worse and worse, while the X-coordinate accuracy remains high, i.e., you have a 1D tracking in practice
- Since a regular approach may not work well, special solutions must be considered for tracking in narrow aisles
Problems and challenges
- Everything revolves around the line of sight: Line of sight is a must for precise indoor positioning systems
- Since the ultrasound (or UWB, or optical) doesn’t propagate through shelves well-enough to be used for positioning, each aisle must be covered with the indoor tracking separately
- Since the aisles are narrow, they are packed densely, and there are many of them, which creates additional difficulties because the direct ultrasound signal doesn’t go through the shelves well enough to be used for positioning, but it can go well enough (unfortunately) to interfere with the tracking in the parallel aisles
- Because there are so many aisles, you need many beacons over a relatively small area (square meters or square feet). The resulting cost of the solution depends far more on the complexity of the area, not on its sheer size
- If the area is small but many beacons are used and you need tracking in IA, another complication arises – ultrasound frequency reuse. Since there are only 8 ultrasound frequencies, and they are typically more than enough for larger areas, for example, warehouses, where in 50-100 meters you need to reuse the frequency, the ultrasound is already well attenuated, so you can reuse it without worries. In small and dense areas with narrow aisles or in a small museum, you must a) place beacons so that they don’t emit in the direction of other beacons with the same frequency, b) disable transducers that you don’t need but which may create undesired interference with the neighboring submaps, c) place them lower – behind the aisles – to create shadows, and build the system more accurately in many ways. And, of course, you can always use a TDMA. However, that leads to a lower effective location update rate and more difficult handovers, if the location update rate is too slow, but the mobile object is too fast for the resulting location update rate. There are always solutions. But they may require more attention, more effort, and a deeper understanding of the system
Solutions and advice
1) Track above the shelves:
- If you have a scanning robot, for example, you can install stationary beacons on the ceiling, install a pole on the robot, place 1-2 x Omni-Microphones on it for Location+Direction, keep the microphones above the shelves, and enjoy the most basic, the least expensive, and the most reliable and accurate solution at the same time. See the 2D tracking examples in the Placement Manual
- It would be a basic 2D tracking. It doesn’t matter that the robot drives between the shelves, and the aisles are narrow. For the indoor positioning system, it would be a regular 2D tracking, and with a couple of stationary Super-Beacons, you can cover 1,000 m2 of area
- So, avoid the fight (and costs) altogether
2) Use 1D tracking in aisles:
- The next best thing is to track in 1D in narrow aisles: service zones 02a, 02b, 02c, 02d, o2e with the beacons n04, n05, n06, n07, n08 respectively
- In other areas, there will be regular 2D submaps: 01, 04, 03
- There will be handover zones 06 between 2D and 1D submaps
- This works for submaps 02a-02e up to about 30 meters. For larger distances (30-100 m), it is recommended to use Super-Beacons with Horns as stationary beacons n04-n08, if NIA can be used, for example, for 1-4 mobile robots/AMRs or forklifts
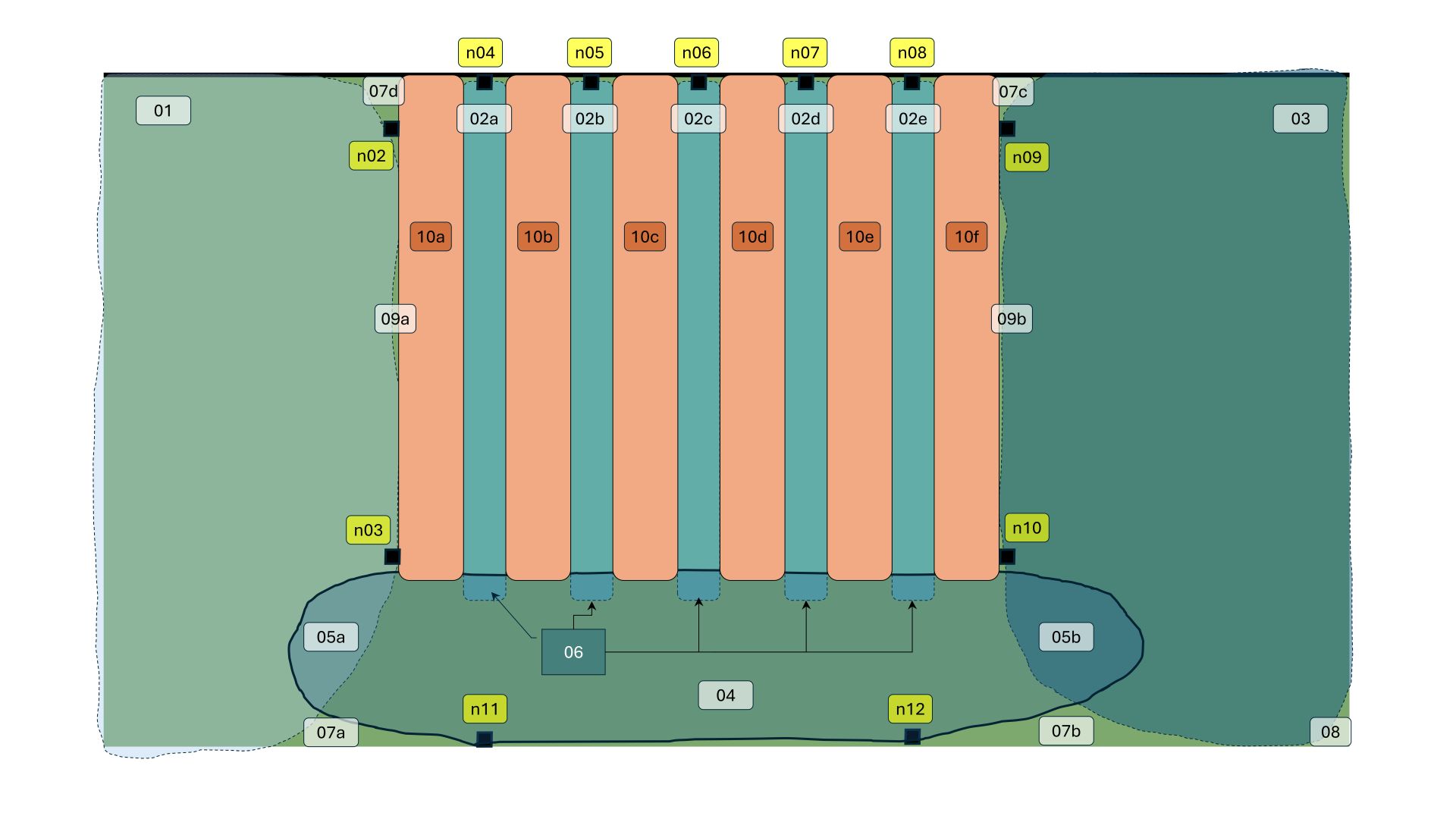
Other basics about a typical map above:
- 01, 02, o3, 04 – service zones – a service zone is a zone for each submap, where the submap serves, i.e., tracks the mobile beacons
- n02–n12 – mobile beacons. Their type depends on the architecture (IA, NIA, or MF NIA). Typically, they are Super-Beacons or Industrial Super-Beacons
- 05a, 05b, 06 – handover zones – an overlap between service zones. It is important to have them and to have soft tracking handovers between the submaps
- 10a–10f – shelves. See the photo above or a video from a factory floor
- A submap is a set of beacons (1 to 4 per submap; 1 beacon – 1D tracking; 2 beacons – 2D tracking; 3-4 beacons – 3D tracking) that track within a particular service zone. For example, n02-n03 comprise a submap tracking in a service zone 01, and beacons n11-n12 create a submap tracking in the service zone 04
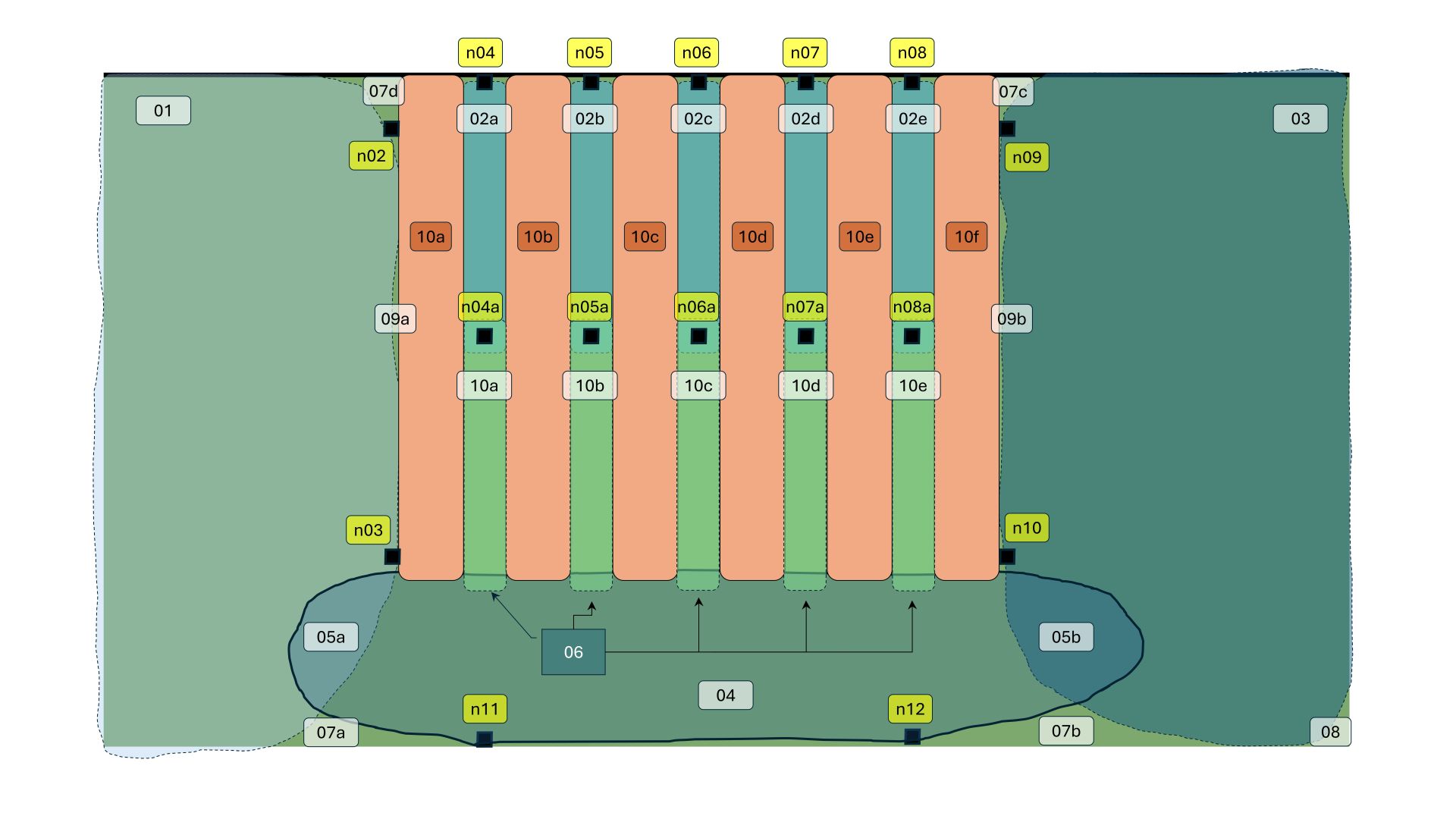
- However, for a larger number of mobile objects, IA is required. It is a more complex, though, a more typical case
- The first solution is to install stationary beacons n04a, n05a, n06a, n07a, n08a every 20-25 meters in the aisle. Still, there will be 1D tracking. And there will be ~5m handover zone in the 1D submaps
- The second solution is to use special beacons with Horns-TX. As opposed to the Horn (or Horn-RX, which they are), the Horn-TX has a transmitting transducer instead of a microphone in the Horn. We don’t have a ready-to-use Horn-TX product but it is possible to discuss it for larger cases, because it will minimize the total infrastructure investments
- The picture below shows high-level placement recommendations for long and narrow aisles.
- New beacons 04a-08a appeared. They are about 20-25 meters away from beacons 04-08
- New submaps 10a-10e appeared as well
- All principles are the same as with the map in the upper picture, but more network elements
3) Tracking in 1.5D, 2.5D:
- For 1.5D tracking – X along the aisle and a direction – left or right aisle – use the Paired Beacon configuration of the mobile beacon, and you will know where you are facing
- For 2.5D tracking, the recommendation will depend on the type of tracking. If we are tracking a forklift fork, install a “stationary” on the forklift, and the mobile beacon will be on the fork. You will get 1.5D tracking as described above. And Z tracking will be obtained from the “stationary” beacon on the forklift. Of course, the “stationary” beacon against the walls and shelves is mobile. But the mobile beacon on the fork is stationary and used as a reference
- 2.5D drone tracking is also possible. In this case, the height may be taken from its barometer, because, typically, the requirements for Z are not too high
The video below starts with 1D tracking in the corridor, then moves to 3D tracking in the room, then switches back to 1D tracking in the corridor, and finally switches to 2D-vertical tracking on the stairs.
4) Other important areas to take care of:
Tracking in some areas of the map is more challenging, or the areas can show much lower accuracy than the others. It is not so much about our technology as it is applicable to any system using trilateration. It is all about the geometry. We could put some complex formulas that would confuse those who have finished school long enough to have their trigonometry rusty (me, including :-). Nevertheless, practical hints:
- Areas 07a-07d: tracking may be poor because the area is too close to the line connecting beacons of submap 04 – beacons n11 and n12. See more in the video: Tracking with ultra-short base between stationary beacons. But the situation in this case is even worse because angle is very narrow or close to zero, and the distance can be dynamic range of distances can be highly unfavorable: too close to n11 or too far from n12. Normally, you shall have the dynamic range of distances not more than 10, when you have ultrasound frequencies not neighboring each other in IA, for example, 25k and 31k, or 19k and 45k. For neighboring frequencies, the dynamic range of distance requirements is even tougher – 1:3 or 3, i.e., the distance from n12 to the mobile beacon must not be more than 3 times the distance from the beacon n11. Otherwise, a too close frequency of the beacon n11 and too strong signal (because it is physically close) of the beacon n11 could overwhelm the filters of the mobile beacon, and it cannot hear well the farther beacon n12 or, be exact, won’t distinguish between the real signal of n12 and a leaked (because close in frequency and too strong because physically too close) signal from beacon n11
- Areas 09a-09b: Ultra-wide base tracking and effect on X and Y accuracy. Practical recommendations are simple: to be on the safe side, keep an angle between the line connecting the beacons n02 and n03 and the mobile beacon of at least 20 degrees. There is no clear-cut. You can come closer to the line, and it will still track, but the accuracy will degrade and more and more upon your approach to the line