Home » Basic hints on Holybro X500 drone + PixHawk 6c + PX4 + Marvelmind integration
Basic hints on Holybro X500 drone + PixHawk 6c + PX4 + Marvelmind integration
A customer shared results and we share them with you to help you with integration
I have updated the firmware to 7.910 now. I use PX4 1.14.3.
After once again checking the wiring connection I noticed my mistake – two cables were mixed up.
Thank you for your help and patience, the PX4 is now receiving a GPS signal from the MM hedgehogs. Currently, the copter is able to stand still in the air and land on its own, further tests will be carried out.
After this success, I once again wanted to try out if the same results were possible with ArduPilot firmware.
I started with the new ArduCopter 4.5.4, completed the basic setup and connected the hedgehog the same way as with the PX4 firmware. The hedge was still sending a ublox signal but the AP did not recognize any GPS nor Compass.

Configuration
- Holybro X500 drone
- Pixhawk 6C
- PX4 1.14.3
- Marvelmind SW pack v7.910
- 4 x Super-Beacons as stationary placed near the ceiling and facing down
- 2 x Super-Beacons as mobile for Location + Direction and facing up
- 1 x Modem v5.1 as a central controller
- NIA
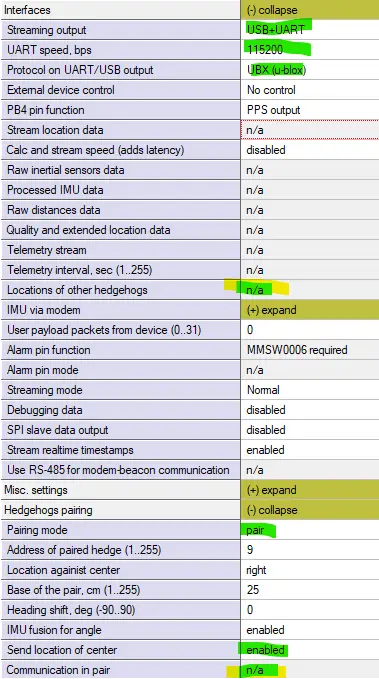
Other settings in Dashboard
Other relevant links
- PixHawk, PX4, ArduPilot, NMEA0183, and uBlox – the main collection of links related to PixHawk
- Autonomous drones – the main page about drones
- Customer success: Autonomous flight of indoor drone based on PixHawk + ArduPilot
- How many mobile beacons do I need per drone?
- Using IA for drones – normally, NIA is recommended for drones. But IA can be a good solution for drone swarms