Greenwich meridian or GPS/GLONASS coordinates are irrelevant when discussing indoor positioning systems (IPS) because your premises are indoors. The premises or the IPS can be anywhere – in Nairobi, underground in Canada, or on Mars – and if the IPS doesn’t have a link to an external coordinate system (a sort of geo-referencing), the system cannot calculate which part of the world it is, even in theory. It can be anywhere.
Imagine you are in a closed room without windows. Your robot is precisely driving indoors using, for example, the Marvelmind Indoor Positioning System. But you cannot measure which part of Earth you and your robot are in – the windows are closed. While you were driving inside, the aliens stole you from the Earth and transferred you to Alpha Centauri. If you haven’t experienced acceleration, you can’t say whether you stayed or moved or are being moved at that moment, and with what speed.
Something similar is already happening to us in real life – not in a hypothetical case with aliens – but in real life and every second. We believe we measure our coordinates with high accuracy against the Earth. At the same time, the Earth is moving several km/s relative to the Sun, and our solar system is moving at several tens of km/s relative to the center of the galaxy, etc. What are my coordinates? Against what?
Thus, we establish that coordinates are always relative.
What does the Marvelmind indoor positioning system use as a relative point?
- When you build the Marvelmind indoor positioning system, one of the stationary beacons is chosen by the system to have (0,0,0) coordinates
- You can assign any beacon to have a (0,0,0) coordinate. Even more, you can set any point on the map to be (0,0,0)
- Since, in some cases, the indoor system is linked with the outdoor, it is pretty easy to make geo-referencing: you link the IPS’ (0,0,0) point with external coordinates, for example, GPS coordinates, and turn the map so that it would match the angular direction between the two coordinate systems as well. Effectively, you align and lock not one but two points on the indoor map and two points on the external map. See more about geo-referencing in the Operating Manual
The Marvelmind indoor positioning system is designed, first of all, to guide an autonomous robot from point A to point B. Of course, the same applies to autonomous drones, forklifts, or even people tracking. All these cases are the same for this discussion. But for simplicity, let’s discuss autonomous robots.
With this approach in mind (driving from point A to point B), it does not matter what the absolute distance between point A and point B measured in meters is. Even when we say “absolute distance,” it is not absolute. It is a distance measured in an arbitrarily chosen unit of distance, a meter. It could be in meters, the robot’s length, or units from our indoor positioning system.
For precise autonomous driving or precise indoor positioning, it is crucial that the system can measure the coordinates of mobile beacons with high accuracy. Coordinates in the coordinate system of stationary beacons. Not in meters. Not in some GPS coordinates but in the internal coordinate system of the stationary beacons. Because we know the coordinates of point A and point B in internal coordinates, and the robot’s current location in internal coordinates. So, internal distances, coordinates, and dimensions matter – not some “external meters” or external coordinates.
Here is how it works in practice, on the example of a mobile robot:
- You drive or push your robot to point A and record/set/assign a point on the map of stationary beacons (IPS map/RTLS map) corresponding to the point in the real space
- Then you drive/push your robot to a point B in the area and assign a point B on the map of the stationary beacons
- You repeat the same for whatever number of points you wish, for example, to all topics in between points A and B, if the robot turns along the way, and has to drive on a complex curve
- The robot’s controller measures the difference between its current location in the indoor positioning system’s internal coordinates and adjusts its driving (e.g., by changing motor power or turning, as needed). Then it repeats the same process with some logic until the coordinates are close enough to confirm that we are on the right path or have reached the right point. All this is done, measured in internal coordinates of the indoor positioning system
Once you have an indoor positioning system up and running, your robot is ready to drive because it has the coordinates for points A and B and its current position. The robot’s autopilot will compare the expected location (the next desired waypoint) with its current location and drive it accordingly.
What is essential, the robot doesn’t need to know the distance in meters. Everything is measured in some internal units – inside the coordinate system, inside the indoor positioning system. Not in meters.
Why do we focus on this so much? Why do we stress that the absolute distances do not really matter and even harm sometimes when mixed with internal measurement units/distances:
- Our system uses ultrasound time-of-flight. This is why Marvelmind IPS is so precise. But this is why it is important to remember that the speed of sound in the air is not an absolute constant. It depends on many parameters and, first of all, the air temperature. The indoor air temperature is likely stable. However, even that is not always the case. Besides, the temperature can be stable, but the absolute air temperature may differ drastically, from -40 to +60 °C, for example. And the speed of sound in the air would be notably different in those conditions. Thus, the temperature must be taken into account. Yes, and now.
- Imagine an air balloon. If you have more pressure inside, the balloon is slightly bigger; if you have lower pressure inside, slightly smaller. Draw a triangle on the surface of the balloon. It will have three pivoting points – your driving waypoints.
 They are relative coordinates within the balloon’s coordinate system. The relative coordinates of the waypoints wouldn’t change whether you have a slightly larger or slightly smaller balloon. The relative coordinates remain the same. The ratio of distances remains the same.
They are relative coordinates within the balloon’s coordinate system. The relative coordinates of the waypoints wouldn’t change whether you have a slightly larger or slightly smaller balloon. The relative coordinates remain the same. The ratio of distances remains the same. - You can always precisely drive from one point to another. But if you measure the lengths of each line in “external meters,” you will quickly find that the distances differ (obviously because the balloon’s diameter changed). And suppose you measured the coordinates of those points in “ground truth,” for example, against something external and using, for example, a laser distance meter. In that case, one may conclude that the “absolute” coordinates are measured incorrectly. But the conclusion is incorrect because: a) there are no “absolute” coordinates, b) there is confusion between the indoor positioning system and some external positioning systems. The robot driving on the surface wouldn’t notice any problem with the dimensions. Maybe, only indirectly, like: increased energy consumption, because the size of the balloon increased in terms of the size of the wheels of the robot, and the robot must make more revolutions to cover the same distance
Therefore, it is important to clearly distinguish between relative and absolute distance. It is essential to understand that “absolute” space is not absolute either – it is the relative distance measured in something else – platinum meters, the revolution of the wheels, etc.
Summary and key points:
- The Marvelmind indoor positioning system is designed to drive from point A to point B. It is not “a laser distance meter,” at least without a calibration
- We define accuracy against the points on the map of the stationary beacons. It is relatively accurate. And this accuracy is typically better than ±2cm
Remember, the Marvelmind Indoor Positioning System is first and foremost designed to drive a robot from point A to point B. To be very accurate in doing that, we need to minimize the dispersion in the measurements of the locations of point A, point B, and the robot’s current location.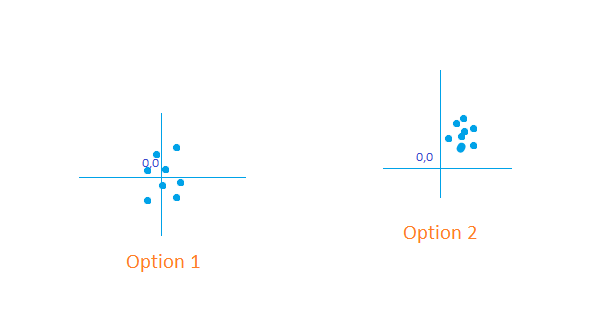 Option 1 has a higher distribution but a lower average shift against (0,0) coordinates. Whereas Option 2 is relatively more accurate but has a bigger absolute change against the (0,0) point.
Option 1 has a higher distribution but a lower average shift against (0,0) coordinates. Whereas Option 2 is relatively more accurate but has a bigger absolute change against the (0,0) point.
Once again, an absolute shift from an expected point measured in meters or other units outside our coordinate system doesn’t matter. We must make exact measurements within the system: for points A and B and the robot’s current location. Then, we will be able to drive from point A to B very accurately and return very accurately, and it doesn’t matter whether it takes us 10.000m or 10.200m to go from A to B. Therefore, when we drive, we bring the robot to point A and measure its position with high accuracy. Then, we move the robot to point B. It can be shifted against some external coordinate system, against an external grid – it doesn’t matter. After we moved the robot, we again recorded the measured location of point B in our indoor positioning system. And now, we want to return to point A as precisely as possible. The correct choice is Option 2 because it is more accurate, and it doesn’t matter that it is shifted in the external coordinate system.
Summary:
- Which option is better: Option 1 or Option 2? It depends on the indoor positioning system’s needs. Marvelmind IPS focuses on Option 2. When we refer to ±2cm accuracy, we refer to Option 2. And Option 2 is much better for real-life applications when you need to drive from point A to point B precisely
- What is the absolute accuracy for Marvelmind IPS? – a shift from an externally defined (0,0) coordinate – Without a calibration, typically – 1-2%. Not ±2cm, but 1-2%, because the measured distance depends on the speed of sound in the air, and the speed of sound depends on temperature. Notice that 1-2% is significantly more than ±2cm on typical sizes for our system. For example, for a 10m size, the absolute error is 10-20cm. Thus, the measured result using Marvelmind Indoor GPS will have a very low dispersion – typical sigma of ±2cm – but it can easily be shifted by 1-2%, i.e., perhaps 10-20 times more than the diameter of the measurement spot
Therefore, we are perfect if you want to use Marvelmind RTLS for autonomous driving or flying. If you’re going to use us as an alternative to a laser distance meter, only with calibration and a clear understanding of the limitations (air temperature, first of all).