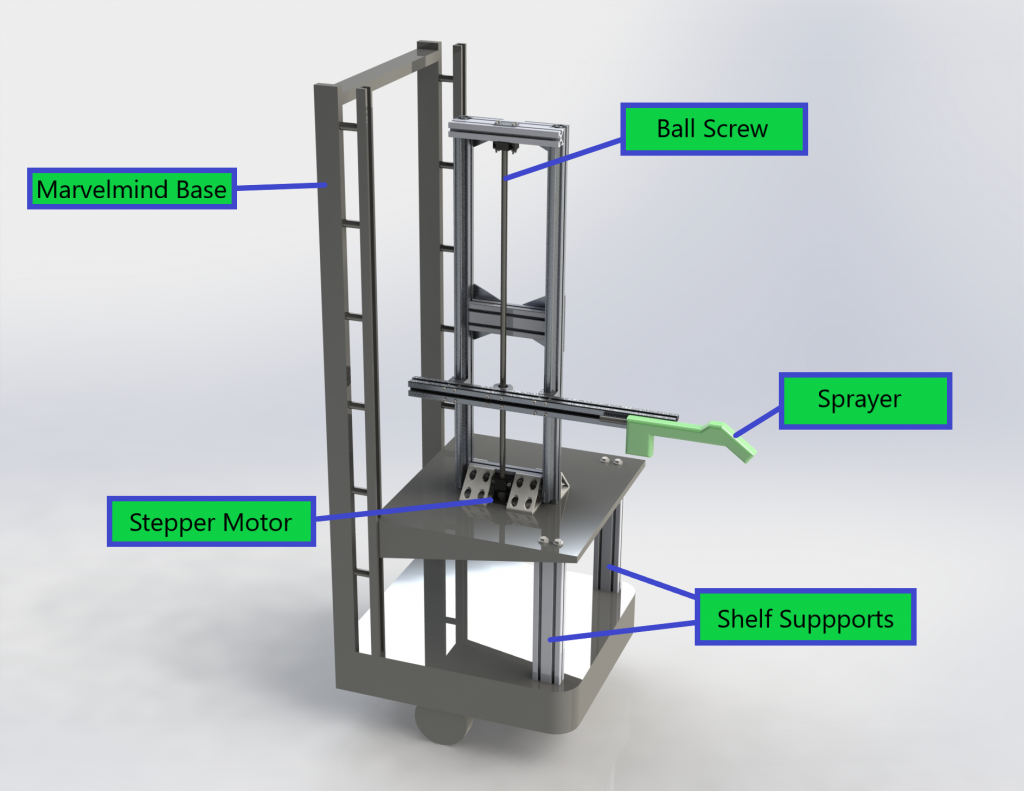
The figure below depicts the current state of the Salus robot. The figure illustrates the manipulator mounted onto the Marvelmind v100 base. On top of the manipulator, the Intel RealSense is mounted at a 30-degree angle to ensure the detection subsystem can properly capture images of the environment. Mounted on the shelf sits the Ryobi Electrostatic Sprayer fluid tank. Secured to the horizontal member of the manipulator is the electrostatic sprayer gun. Housed inside the robot chassis is the Jetson AGX, which is responsible for the compute of all of our subsystems. Finally, a waterproof skirt has been constructed out of a tarp to ensure no fluids can leak inside the chassis during discharge of the electrostatic spray gun.

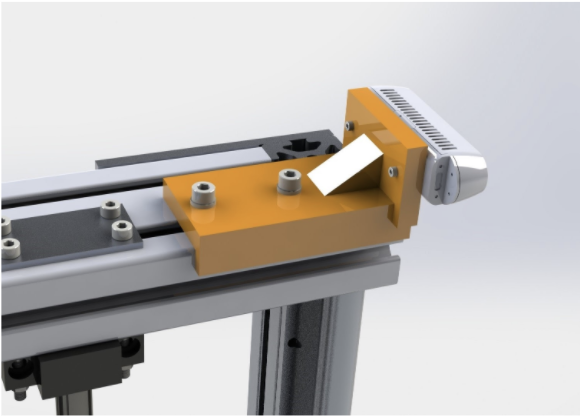
The figures below show the original CAD designs of the robot base with the manipulator mounted and the mount for the Intel RealSense camera.